
资料下载


×
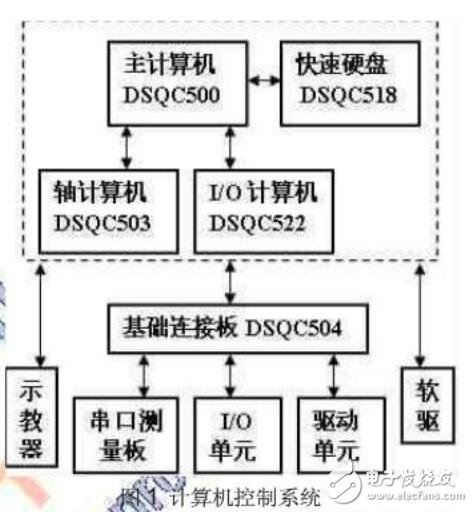
ABB机器人S4Cplus硬件系统故障检测
消耗积分:0 |
格式:rar |
大小:1.08 MB |
2017-10-13
分享资料个
ABB 机器人硬件系统是由两部分组成,即机器人本体和控制柜。机器人本体。机器人本体是由六个转轴组成的机构,每个转轴都带有一个西门子生产的交流伺服电机。同时电机自带的编码器反馈信号给驱动器,驱动器根据反馈值与目标值进行比较,调整转动的角度,机器人运动精度达到士0.05mm~士0.2mm。编码器与串口测量板(SMB) 连接,每个交流伺服电机都有单独的供电和编码器测量线路。串口测量板主要起接收六个轴编码器位置参数的作用,并通过串口测量板与控制柜计算机系统通信,调整机器人运行。

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章






