
资料下载


×
弧焊机器人MOTOMAN编程方法
消耗积分:0 |
格式:rar |
大小:1.00 MB |
2017-10-13
分享资料个
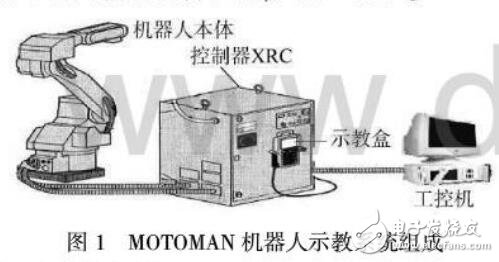
机器人研究经历了3 个阶段,即示教再现编程阶段、离线编程阶段和自主编程阶段。因技术尚不成熟,目前,在国内外生产中应用的机器人系统大多处于示教再现编程阶段。本实验室采用首钢莫托曼公司生产的弧焊机器人MOTOMAN-UP20,它具有6 个旋转关节,每个轴都由伺服电机驱动,轴上安装转角编码器,可随时检测每轴的运动位置,使其不仅工作精度高,而且灵巧。机器人示教主要有2 种方式1-2,一种为在线示教,由人直接通过示教盒对MOTOMAN 机器人进彳示教;另一种为离线示教,它与直接示教不同,操作者不对实际作业的机器人直接进行示教,而是脱离实际作业环境生成示教数据,通过PC 机间接对机器人控制器XRC 进行示教。本研究以直接示教来探讨示教编程方法。

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章





