
资料下载


×
ARM家用智能垃圾桶的设计方案探究
消耗积分:1 |
格式:rar |
大小:0.5 MB |
2017-10-19
分享资料个
随着人们生活水品的不断提高,在人们购买各种家具或家电时越来越重视其智能化和人性化。人们在生活中产生的生活垃圾都需用垃 圾桶放置,考虑到老人、孕妇或者残疾人,放置垃圾时存在的不便、费时、费力等问题。设计针对这些问题,提出了具有语音识别功能的智能垃圾桶设计方案,当用 户想要扔垃圾时,只要一声令下,垃圾桶就会快速准确地来到你身边。
1 系统硬件设计
系统硬件包括垃圾桶车体机械结构和硬件控制电路两个部分。其中车体机械结构为一部三轮小车车体,能按照在不同地点处用户发出的声音指令,自动行驶到用户所在 地。系统硬件电路总体结构框图如图1所示,包括电源模块、ARM最小系统、声源定位模块、语音识别模块、避障模块和电机驱动模块。
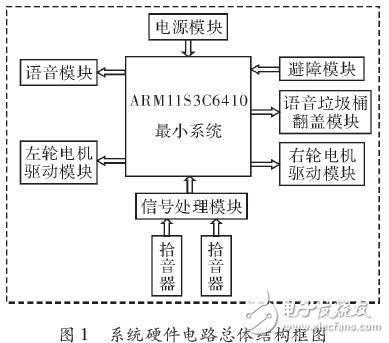
工作原理:首先通过语音识别模块识别出用户的呼叫命令,同时通过声源定位模块判断用户所处位置,再通过ARM产生驱动电机的PWM信号,利用电机驱动模块 驱动垃圾桶向声源方向行驶,并在行进过程中,利用避障模块自行避开障碍物。同时,该设计还支持用户对垃圾桶前、后、左、右行驶或打开、关闭垃圾桶盖等语音 控制。
1.1 电源模块
系统所有模块和控制器都需要+5 V的工作电压,采用锂电池进行供电,并用LM2576S-5稳压芯片将电压稳定在+5 V,然后通过稳压源LM1117-33和LM1117-18为S3C6410芯片3.3 V和1.8 V电压。
其余语音芯片UDA1341TS、拾音器的5 V供电、红外避障、直流电动机均为+5 V供电。
1.2 声源定位模块
声源定位模块主要包括拾音器构成的麦克风阵列和信号处理单元,如图2所示。
系统中麦克风阵列选用2个拾音器来实现,其监听范围为30~50 m2。由于拾音器所拾取的声音信号太小,易受环境噪声影响,因此有必要对声音信号进行预处理,通过信号调理单元的处理,使其能够满足系统要求。为满足拾音 器所得到的微弱电信号进行放大,系统采取两级放大电路。又由于A/D模块不能采集负电压信号,因此需要对放大后的电信号进行偏置,使其不出现负电压,便于 ARM采样,使其输出的误差更小。
1.3 语音识别模块
设计采用 Philips公司UDA1341TS专用的语音处理芯片,能对语音实现放大、滤波、采样、A/D或D/A转换及进行数字语音处理功能,并且支持璐总线数 据格式,与ARM芯片S3C6410内置IIS总线接口配合使用。ARM芯片上内置的IIS接口不但能够读取IIS总线上的数据,为FIFO数据提供 DMA的传输模式,而且可以同时传输和接收数据。UDA1341TS对所采集的语音信号进行采集和编码,由DTW模型算法进行模板训练,并将训练结果存储 在Flash中以便于在语音信号识别阶段读取模板。在语音信号识别阶段,将输入的语音信号经过音频数字信号编译码器UDA1341 TS处理后,通知S3C6410嵌入式Linux操作系统,与保存在Flash中的参考样本进行对比,找出最佳的声音识别效果,然后由嵌入式Linux操 作系统中的系统调用函数控制S3C6410的I/O口,指挥垃圾桶的运动。
1 系统硬件设计
系统硬件包括垃圾桶车体机械结构和硬件控制电路两个部分。其中车体机械结构为一部三轮小车车体,能按照在不同地点处用户发出的声音指令,自动行驶到用户所在 地。系统硬件电路总体结构框图如图1所示,包括电源模块、ARM最小系统、声源定位模块、语音识别模块、避障模块和电机驱动模块。
工作原理:首先通过语音识别模块识别出用户的呼叫命令,同时通过声源定位模块判断用户所处位置,再通过ARM产生驱动电机的PWM信号,利用电机驱动模块 驱动垃圾桶向声源方向行驶,并在行进过程中,利用避障模块自行避开障碍物。同时,该设计还支持用户对垃圾桶前、后、左、右行驶或打开、关闭垃圾桶盖等语音 控制。
1.1 电源模块
系统所有模块和控制器都需要+5 V的工作电压,采用锂电池进行供电,并用LM2576S-5稳压芯片将电压稳定在+5 V,然后通过稳压源LM1117-33和LM1117-18为S3C6410芯片3.3 V和1.8 V电压。
其余语音芯片UDA1341TS、拾音器的5 V供电、红外避障、直流电动机均为+5 V供电。
1.2 声源定位模块
声源定位模块主要包括拾音器构成的麦克风阵列和信号处理单元,如图2所示。
系统中麦克风阵列选用2个拾音器来实现,其监听范围为30~50 m2。由于拾音器所拾取的声音信号太小,易受环境噪声影响,因此有必要对声音信号进行预处理,通过信号调理单元的处理,使其能够满足系统要求。为满足拾音 器所得到的微弱电信号进行放大,系统采取两级放大电路。又由于A/D模块不能采集负电压信号,因此需要对放大后的电信号进行偏置,使其不出现负电压,便于 ARM采样,使其输出的误差更小。
1.3 语音识别模块
设计采用 Philips公司UDA1341TS专用的语音处理芯片,能对语音实现放大、滤波、采样、A/D或D/A转换及进行数字语音处理功能,并且支持璐总线数 据格式,与ARM芯片S3C6410内置IIS总线接口配合使用。ARM芯片上内置的IIS接口不但能够读取IIS总线上的数据,为FIFO数据提供 DMA的传输模式,而且可以同时传输和接收数据。UDA1341TS对所采集的语音信号进行采集和编码,由DTW模型算法进行模板训练,并将训练结果存储 在Flash中以便于在语音信号识别阶段读取模板。在语音信号识别阶段,将输入的语音信号经过音频数字信号编译码器UDA1341 TS处理后,通知S3C6410嵌入式Linux操作系统,与保存在Flash中的参考样本进行对比,找出最佳的声音识别效果,然后由嵌入式Linux操 作系统中的系统调用函数控制S3C6410的I/O口,指挥垃圾桶的运动。

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章





