
资料下载


×
机器人自动装配线产品输送技术的研制
消耗积分:0 |
格式:rar |
大小:0.1 MB |
2017-10-24
分享资料个
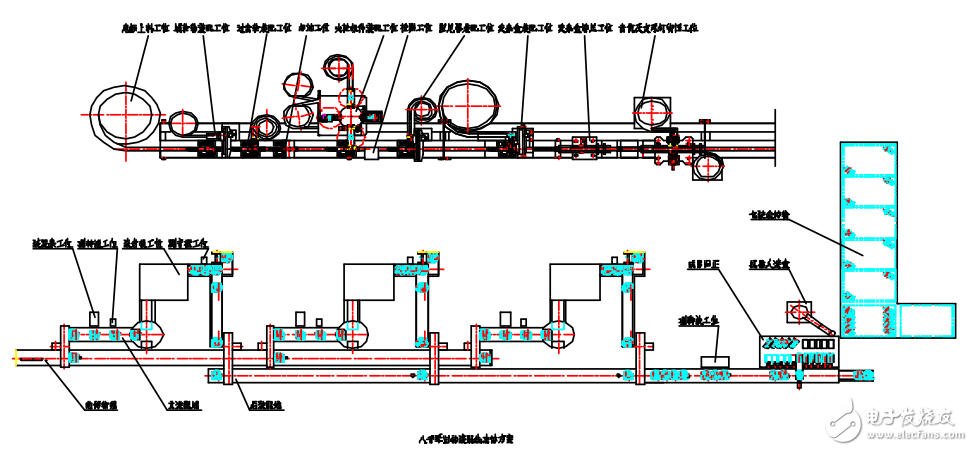
文章对研制的精密机芯机器人自动装配生产线的规模 功能作了介绍,围绕研制方法和技术路线,对产品输送和定位方式 工艺分析和工序工位分配 各种装配专机 装配机器人及各种末端操作器的研制DFA 的研究分析以及研制工作中的关键技术分别作了介绍。
研究工作首先从装配线的整体规划和产品输送方案论证着手,分析了产品特点和装配要求,从多种传输方案中确定产品底板直接异步输送 直接定位方案,该方案具有整体结构简单 定位精度高经济性好等优势。
开展了装配工艺分析 装配动作分解及优化 装配工位的确定等工作 分析了原有手工装配工序 装配动作 结合机器人自动装配的特点,经过优化综合,有的把一个复杂装配动作分解为几个简单动作来实现,有的将几个零件的复杂装配过程集中于一个工位,制定了科学合理的工艺流程 使整条生产线具有主装配线与分支装配线相结合,树式 串联 并联式流程结构相结合的工艺流程特点,根据不同的装配速度在不同的工位完成对 1 至 5 个产品的操作,如一次装配二个阻尼器 一次检测三个机芯 一次将五个产品装入箱内 使装配生产线全线能满负荷运行。

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章





