
资料下载


基于红外反射式传感器智能车系统的设计
分享资料个
由于智能车设计属于移动性高精度实时控制领域,因
此各模块必须具有精度高、多通道多样化传感器综合控制、
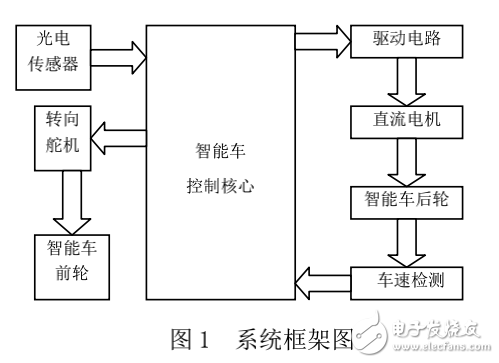
智能控制等诸多性能要求[1].将整个小车系统分为:信息采
集模块、单片机模块、执行模块以及电源模块.系统框架
见图 1.
1.1.1 信息采集模块 采集外部信息,供微控制器处理,
其核心是红外线发射对管.
1.1.2 信息处理模块 信息处理模块包括信息处理和控制
模块,其核心是 MCU.该 MCU 采用飞思卡尔公司的单片
机 MC9S12DG128B,单片机具有 16 位 PWM 控制端口,便
于对电机的控制.MCU 接收到采集来的信号,对信号进行处理后作出判断,并发出控制命令.
1.1.3 执行模块 该模块包括电机、舵机的驱动,当接收到 MCU 的命令后便执行相应的操作,同时信息
采集模块又定时采集电机和舵机的状态信息,反馈给 MCU.从而整个系统构成一个闭环系统,在运行过
程中,系统自动调节而达到正确、平稳行驶的目的.
1.2 控制方案的设计
系统的控制部分分为小车转向角控制和速度控制 2 个部分.小车转向角的控制是通过 PWM 信号进行
控制,根据不同的路况,单片机给出舵机所需要的 PWM 控制信号,达到控制目的.
设计采用 PD 控制算法对小车速度进行闭环控制.小车在前进过程中,根据不同的路况给出不同的速
度值,通过 PID 控制器进行速度调节,以缩短小车的速度控制响应时间,减少稳态误差.

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章






