
资料下载


×
数控系统伺服驱动电路的组成及其优化方法介绍
消耗积分:0 |
格式:rar |
大小:0.3 MB |
2017-10-31
分享资料个
伺服驱动优化的目的就是让机电系统的匹配达到最佳,以获得最优的稳定性和动态性能。在数控机床中,机电系统的不匹配通常会引起机床震动、加工零件表面过切、表面质量不良等问题。尤其在磨具加工中,对伺服驱动的优化是必须的。
数控系统伺服驱动包括3个反馈回路,即位置回路、速度回路以及电流回路,其组成的框图如图1所示。最内环回路反应速度最快,中间环节反应速度必须高于最外环,如果没有遵守此原则,将会造成震动或反应不良。
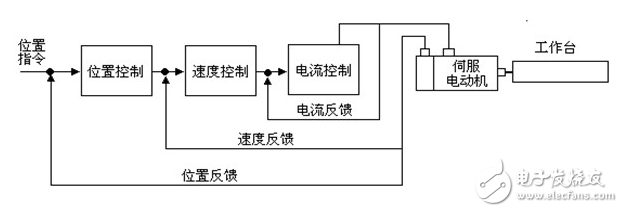
图1 伺服系统控制回路
伺服优化的一般原则是位置控制回路不能高于速度控制回路的反应,因此,若要增加位置回路增益,必须先增加速度回路的增益。如果仅仅增加位置回路增益,机床很容易产生振动,造成速度指令及定位时间增加,而非减少。在做伺服优化时必须知道机床的机械性能,因为系统优化是建立在机械装配性能之上的,即不仅要确保伺服驱动的反应,而且也必须确保机械系统具备高刚性。

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章



