
资料下载


×
控制器局域网简介及基于微控制器的双CAN冗余设计方案
消耗积分:0 |
格式:rar |
大小:0.3 MB |
2017-11-07
分享资料个
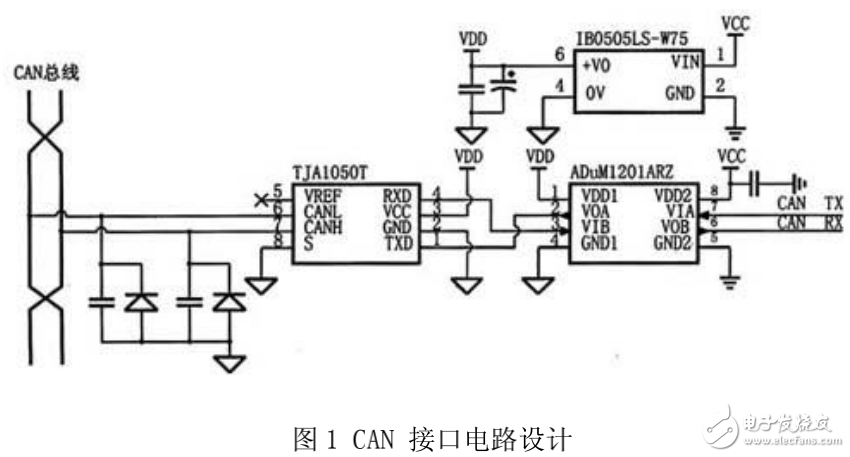
控制器局域网( ControllerA reaN etwork, CAN)是一种多主方式的串行通讯总线。CAN 总线具有较高的位速率, 很强的抗电磁干扰性, 完善的错误检测机制, 在汽车、制造业以及航空工业领域中得到广泛应用 。由于船舶机舱环境极为恶劣, 且船舶航行过程中维修条件不如陆上, 对 CAN 通信的可靠性要求很高, 采取双 CAN 冗余总线提高通信可靠性。本文提出一种基于 STM32F105微控制器的双 CAN 冗余设计方案。
STM32F105 是 STM icroe lectron ics 公司推出的一款基于 ARM Cortex- M3内核的 32 位微控制器, 其内核是专门设计于满足高性能、低功耗、实时应用的嵌入式领域的要求。由于采用 Thumb - 2 指令集,与 ARM7 微控制器相比 STM32运行速度最多可快 35% 且代码最多节省 45% 。较高的主频和代码执行效率使系统在进行 CAN 总线数据收发的同时仍可运行总线冗余算法。STM32F105 微控制器内部集成 2 路独立的 CAN 控制器, 控制器集成在芯片内部, 避免了总线外扩引入的干扰, 同时简化了电路设计、降低成本。

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章





