
资料下载


×
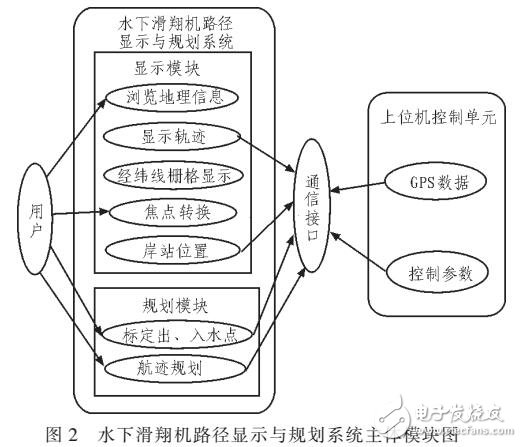
基于GIS引擎的水下滑翔机路径显示于规划系统
消耗积分:0 |
格式:rar |
大小:0.99 MB |
2017-11-09
分享资料个
水下滑翔机因为其在海水中的可操作性、自主性以及良好的持久力,引起了海洋学家们的广泛关注,近年来一直研究热点问题。水下滑翔机在控制浮力的过程中利用浮力的变化、水动力外型和机翼来产生水平的移动。这种推进方式能量消耗很低,能够在没有人工干预的情况下在水中长时间作业。
因为这些显著的特点,水下滑翔机已成为海洋观测系统中必不可少的组成部分。目前,国内外的学者已在机械结构、内部控制算法、多滑翔机协同组网等方面进行了深入的研究,Slocum 、Spray、SeaC;lider等是国际上使用较多的水下滑翔机。航迹规划和显示功能在水下滑翔机的实验和使用过程中有着重要作用,航迹规划能够更有效的使用滑翔机,缩短滑翔机水中作业时间,降低能量消耗。航迹显示功能可以实时的反馈滑翔机的运行状态,从而实时的纠正水下滑翔机的航向。为了提供给水下滑翔机用户一个更加友好、更加便利、更加科学的控制系统,本文设计和实现了水下滑翔机路径可视化和规划系统,使得用户可以更加直观地看到水下滑翔机的航迹,更好地操控水下滑翔机。

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章





