

无人驾驶关键技术分析
智能驾驶
描述
无人驾驶技术是传感器、计算机、人工智能、通信、导航定位、模式识别、机器视觉、智能控制等多门前沿学科的综合体。按照无人驾驶汽车的职能模块,无人驾驶汽车的关键技术包括环境感知、导航定位、路径规划、决策控制等。
(1)环境感知技术
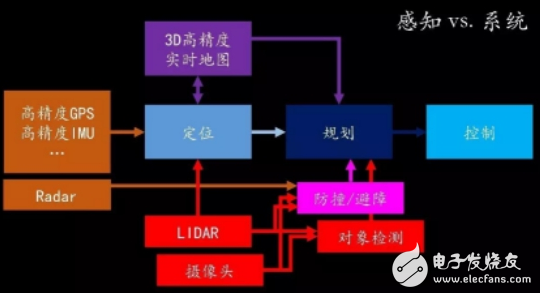
环境感知模块相当于无人驾驶汽车的眼和耳,无人驾驶汽车通过环境感知模块来辨别自身周围的环境信息。为其行为决策提供信息支持。环境感知包括无人驾驶汽车自身位姿感知和周围环境感知两部分。单一传感器只能对被测对象的某个方面或者某个特征进行测量,无法满足测量的需要。因而,必需采用多个传感器同时对某一个被测对象的一个或者几个特征量进行测量,将所测得的数据经过数据融合处理后。提取出可信度较高的有用信号。按照环境感知系统测量对象的不同,我们采用两种方法进行检测:无人驾驶汽车自身位姿信息主要包括车辆自身的速度、加速度、倾角、位置等信息。这类信息测量方便,主要用驱动电机、电子罗盘、倾角传感器、陀螺仪等传感器进行测量。
无人驾驶汽车周围环境感知以雷达等主动型测距传感器为主,被动型测距传感器为辅,采用信息融合的方法实现。因为激光、雷达、超声波等主动型测距传感器相结合更能满足复杂、恶劣条件下,执行任务的需要,最重要的是处理数据量小,实时性好。同时进行路径规划时可以直接利用激光返回的数据进行计算,无需知道障碍物的具体信息。
而视觉作为环境感知的一个重要手段,虽然目前在恶劣环境感知中存在一定问题。但是在目标识别、道路跟踪、地图创建等方面具有其他传感器所无法取代的重要性,而在野外环境中的植物分类、水域和泥泞检测等方面,视觉也是必不可少的手段。
(2)导航定位技术
无人驾驶汽车的导航模块用于确定无人驾驶汽车其自身的地理位置,是无人驾驶汽车的路径规划和任务规划的之支撑。导航可分为自主导航和网络导航两种。
自主导航技术是指除了定位辅助之外,不需要外界其他的协助,即可独立完成导航任务。自主导航技术在本地存储地理空间数据,所有的计算在终端完成,在任何情况下均可实现定位,但是自主导航设备的计算资源有限,导致计算能力差,有时不能提供准确、实时的导航服务。现有自主导航技术可分为三类:
相对定位:主要依靠里程计、陀螺仪等内部感受传感器,通过测量无人车相对于初始位置的位移来确定无人车的当前位置。
绝对定位:主要采用导航信标.主动或被动标讽地图匹配或全球定位系统进行定位。
组合定位:综合采用相对定位和绝对定位的方法,扬长避短,弥补单一定位方法的不足。组合定位方案一般有GPs+地图匹配、GPs+航迹推算、GPs+航迹推算+地图匹配、GPs+GLONAss+惯性导航+地图匹配等。
网络导航能随时随地通过无线通信网络、交通信息中心进行信息交互。移动设备通过移动通信网与直接连接于Internet的web GIs服务器相连,在服务器执行地图存储和复杂计算等功能,用户可以从服务器端下载地图数据。
网络导航的优点在于不存在存储容量的限制、计算能力强。能够存储任意精细地图,而且地图数据始终是最新的。
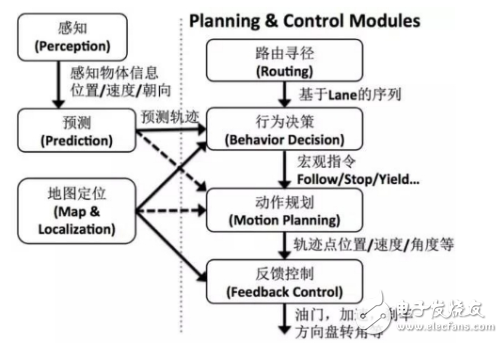
(3)路径规划技术
路径规划是无人驾驶汽车信息感知和智能控制的桥梁,是实现自主驾驶的基础。路径规划的任务就是在具有障碍物的环境内按照一定的评价标准,寻找一条从起始状态包括位置和姿态到达目标状态的无碰路径。
路径规划技术可分为全局路径规划和局部路径规划两种。全局路径规划是在已知地图的情况下,利用已知局部信息如障碍物位置和道路边界,确定可行和最优的路径,它把优化和反馈机制很好的结合起来。局部路径规划是在全局路径规划生成的可行驶区域指导下,依据传感器感知到的局部环境信息来决策无人平台当前前方路段所要行驶的轨迹。全局路径规划针对周围环境已知的情况,局部路径规划适用于环境未知的情况。
路径规划算法包括可视图法、栅格法、人工势场法、概率路标法、随机搜索树算法、粒子群算法等。
(4)决策控制技术
决策控制模块相当于无人驾驶汽车的大脑,其主要功能是依据感知系统获取的信息来进行决策判断,进而对下一步的行为进行决策,然后对车辆进行控制。决策技术主要包括模糊推理、强化学习、神经网络和贝叶斯网络等技术。
决策控制系统的行为分为反应式、反射式和综合式三种方案:反应式控制是一个反馈控制的过程,根据车辆当前位姿与期望路径的偏差,不断地调节方向盘转角和车速,直到到达目的地。
- 相关推荐
- 无人驾驶
-
介绍无人驾驶硬件平台设计2021-09-09 0
-
无人驾驶导航平台2014-11-11 0
-
谷歌欲在英国首推无人驾驶汽车2015-12-14 0
-
【话题】无人驾驶汽车,真的要来了么?2016-06-24 0
-
无人驾驶电子与安全2017-02-22 0
-
2017全球无人驾驶汽车展2017-02-22 0
-
无人驾驶与自动驾驶的差别性2017-09-28 0
-
激光雷达-无人驾驶汽车的必争之地2017-10-20 0
-
无人驾驶汽车的关键技术是什么?2020-03-18 0
-
无人驾驶的发展难点及现阶段技术手段2020-05-07 0
-
无人驾驶分级及关键技术2021-01-21 0
-
无人驾驶汽车的工作原理是什么?2021-06-28 0
-
无人驾驶硬件系统主要包括哪些2021-09-09 0
-
广汽集团董事长张房:突破无人驾驶关键技术2016-06-30 817
-
详细无人驾驶汽车的关键技术——LiDAR2018-02-03 16244
全部0条评论

快来发表一下你的评论吧 !
