

单片机并行处理怎么实现
嵌入式操作系统
描述
单片机并行输入的含义:
并行输入就是两个或两个以上的信号同时输入。比如P0~P3口,都可以同时接受8路输入信号,所以是并行输入。
51单片机po结构:
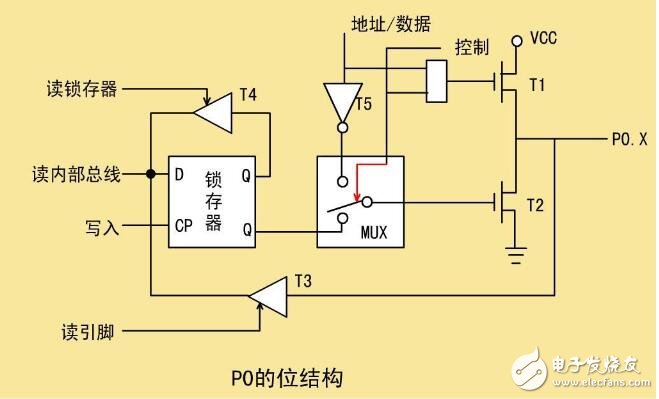
输入缓冲器:在P0口中,有两个三态的缓冲器,在学数字电路时,我们已知道,三态门有三个状态,即在其的输出端可以是高电平、低电平,同时还有一种就是高阻状态(或称为禁止状态),大家看上图,上面一个是读锁存器的缓冲器,也就是说,要读取D锁存器输出端Q的数据,那就得使读锁存器的这个缓冲器的三态控制端(上图中标号为‘读锁存器’端)有效。下面一个是读引脚的缓冲器,要读取P0.X引脚上的数据,也要使标号为‘读引脚’的这个三态缓冲器的控制端有效,引脚上的数据才会传输到我们单片机的内部数据总线上。
51单片机P1结构:
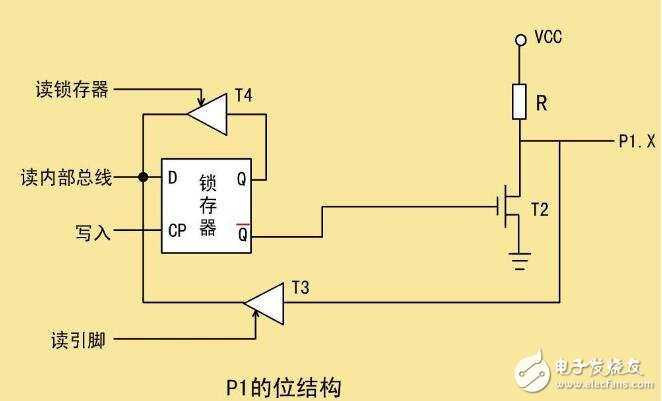
图可见,P1端口与P0端口的主要差别在于,P1端口用内部上拉电阻R代替了P0端口的场效应管T1,并且输出的信息仅来自内部总线。由内部总线输出的数据经锁存器反相和场效应管反相后,锁存在端口线上,所以,P1端口是具有输出锁存的静态口。
由图可见,要正确地从引脚上读入外部信息,必须先使场效应管关断,以便由外部输入的信息确定引脚的状态。为此,在作引脚读入前,必须先对该端口写入l。具有这种操作特点的输入/输出端口,称为准双向I/O口。8051单片机的P1、P2、P3都是准双向口。P0端口由于输出有三态功能,输入前,端口线已处于高阻态,无需先写入l后再作读操作。
51单片机P2结构:
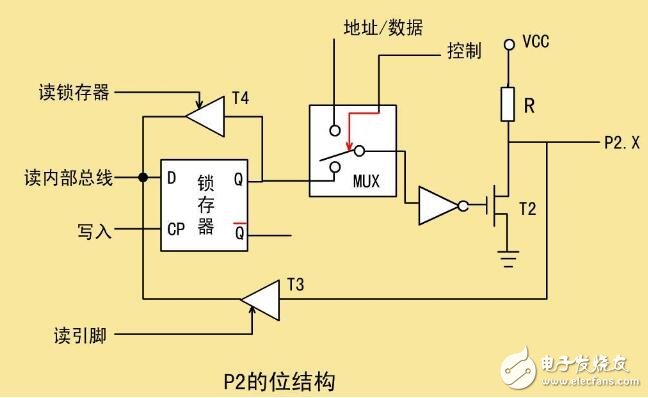
P2口是一个带内部上拉电阻的8位双向I/O口,在结构上P2比P1口多一个输出控制部分。
51单片机P3结构:
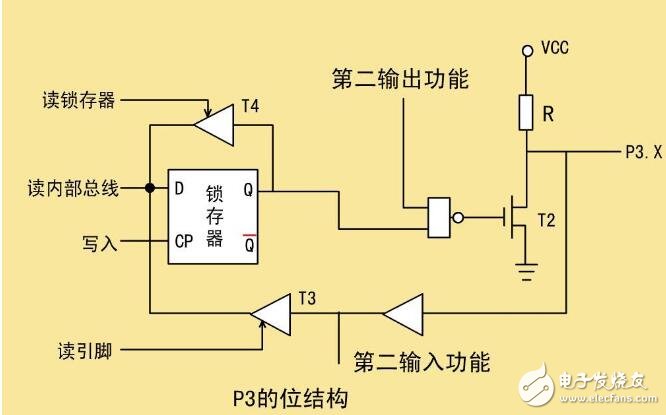
P3口是一个带内部上拉电阻的8位双向I/O口,可以同P1口一样作为第一功能口,也可以每一位独立定义功能。P3口作通用I/O口使用时,输出功能控制线为高电平,与非门的输出取决于锁存器的状态,此时锁存器Q端的状态与其引脚状态是一致的,这种情况下,P3口的结构和操作与P1口相同。
单片机并行处理实现:
快速轮流调用CPU使用权,反正小于10MS的东西,你又看不见,人眼是不能识别刷新频率小于10MS的东西的,所以你看到的所谓并行,单核心的CPU,就是这样,各个任务轮流使用CPU的使用权,谁也不霸占。
利用多线程思想实现单片机系统的伪并行处理
随着计算机的不断发展,越来越多的,优秀的编程思想被提出来,并付诸实践。在某些方面已出现了根本性的变革。另一方面,单片机自从80年代诞生以来,便以飞快的速度发展起来,但由于其物理条件的限制,单片机控制系统的编程仍然局限于经验的模式,很少应用那些新提出的高级语言的编程思想。如果将不断发展的编程思想与广泛应用的单片机控制系统结合起来,一定会大大促进单片机控制系统的进一步发展。使其更广泛的应用于各个方面。
在下面这个具体项目中,实际情况对系统有一些比较苛刻的要求。按照一般的单线程的控制方法已经无法满足实际需求。具体情况如表1(表1所示为生化分析仪的设计中对单片机系统的要求的一部分)
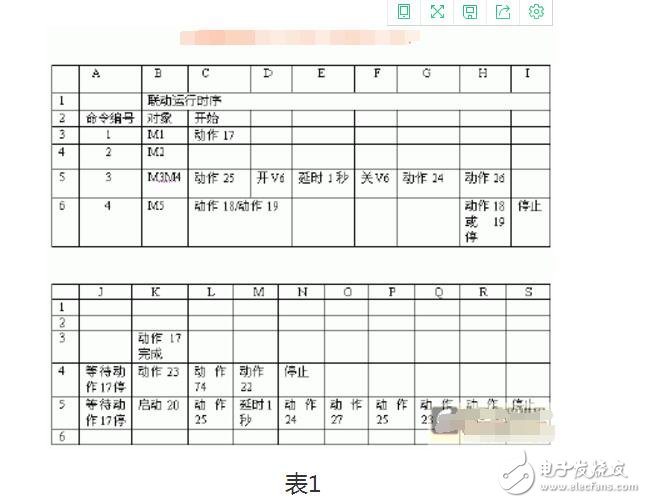
表1所示只占了整个系统要求的1/6。下面对表1中的几项内容加以说明。
对象M1开始动作17操作,即首先步进电机M1(正向)转动查找光电开关信号PS1;查到后执行两次‘过程1‘。过程1:向电机打出30拍。由表1可知该动作从C 段执行到 K段停止;
对象M2即步进电机M2等对象M1执行完动作17后执行动作23等。对象M3和对象M4 则在开始时同时启动,分别执行各自的动作。各个对象之间有的独立,有的相互关联。
整个项目需要控制16台步进电机,21个电磁阀,3个泵,1个直流电机,系统要求全部执行时间为6秒钟,系统要求步进电机以其最快的速度 -----40us—60us打拍。如果以单线程的方式编程让一台电机转到位之后,再转其他电机。这样16台电机打一拍就需要640us---960us 已经无法满足系统要求。这就需要使单片机并行控制多台电机运转。这种以并行的方式驱动各个电机同时启动可以在最短的时间将各个电机同时到位。在转动电机的同时还需要检测一些开关量已确定电机的位置。为了实现这个目的。下面提供第一种解决方案(此方案是常用的方案之一,但作者并不推荐这个方案。因为这个方案成本太高。)。
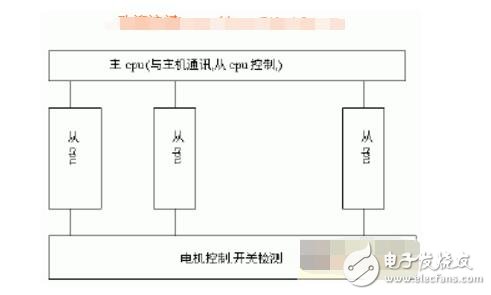
方案一: 硬件实现。
我们可以用多个CPU,将各个电机的控制分到不同的CPU中执行,并可将不互相冲突的电机控制过程放到一个CPU中,其结构如图1
在多线程编程中,每个线程都用编码提供线程的行为,用数据供给编码操作。多个线程同时处理同一编码和数据,不同线程可能各有不同的编码和数据。事实上,编码和数据部分是相当独立的,需要时即可向线程提供。因此经常是几个线程使用同一段编码和数据这就会出现下面的情况
当一个线程在调用数据时,另一个线程可能正在修改这些数据。则前一个线程所调用的数据出现了不确定性。这会影响整个运行结果。为了避免这个问题,多线程编程中,各个线程之间通讯和控制尤为重要。在将多线程的思想向单片机控制系统移植时,这点要非常注意。因为系统多线程运作的实现从其最基本的层面看仍然是单线程的操作;他的实现归根结底是利用了计算机的高速度。它将系统运行的基准时间分成了许多时间片,将各个时间片分给不同的线程,如此一来在一个基准时间内各个线程全都向前行进了一步,然后运行下一个基准时间,周而复始。这样在用户层的角度看来,各个线程是同步进行的。只要速度够块,时间片的划分不会影响用户层面上的应用,这样就可以实现多线程的操作。近年来单片机速度的大幅度提升,这就使多线程思想向单片机控制系统的移植成为可能。
在整个项目中全部的输入信号共39个;同时并行查询的对象最多时有61个系统要求以步进电机最快的速度打拍。时间约40us---60us,为了保证步进电机打拍的稳定性和灵活性。我选用了DSP内部的一个定时器,定时时间为打拍时间的1/3—1/5。设定为10us中断。这个时间为整个系统运行的基准时间。在这段时间内,系统要查询一遍所有对象并向相应的步进电机打拍。在一些线程中还需要采样多次。换句话说,在这个系统时间内。所有线程都要向前行进一步。
就像计算机一样,将这个基准时间分为多个时间片。将各个时间片分给不同的线程,在这种情况下,各个线程的执行是间断的。这与用硬件模拟多线程有本质的不同。像这样既要应用各线程执行的间断性,又要保证各线程运行的连续性。这对软件的设计有了很高的要求,这同时也是单片机控制系统用软件模拟多线程方法中的难点之一,为了解决这个问题,可在个线程自带线程进度指示器用来标志线程的运行进度,即用一个变量记载线程的每一步;如图2
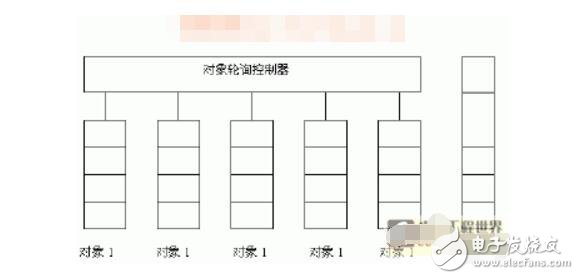
系统设定线程进度指示器用来指引线程的连续运行,同时在一个中断中轮询所有对象。其编程结构大致如下:
时钟中断:
线程1:
线程进度标志:
1: ;
2: ;
3 ;
线程2:
线程进度标志:
1: ;
2: ;
用软件模拟多线程还有很多要注意的地方。
如果选用20兆的DSP来实现控制功能,步进电机最快的打拍速度为40us---60us,则有下面的计算结果,,取1/4,即10us产生一中断,在中断里查询61个对象。20兆DSP单条指令的执行时间大约为50ns在一次中断内可执行的语句数=10us/50ns=200条,如果在分给61个对象,每个对象所分得的指令数仅为3条,已经不够用了,即使选择60兆的DSP,说分指令也只是9条,若以牺牲打拍的灵活性为代价,以60us为已中断。则每个对象所分得的指令数仅为36条勉强够用,如果所控制的对象再多的话,软件编程的灵活性将进一步被压缩,
下面提出了一种扩展的多线程模拟方法,如图
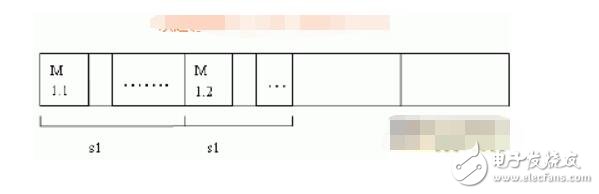
s1,s2为系统运行的基准时间,M1.1 为第一对象组中第一对象。M1.2 为第一对象组中第二对象。
这种扩展的多线程模拟方法仍将系统时间化成多个时间片,与上面不同的是有几个线程(对象)组成一个线程组,共享同一个时间片,例如:当系统运行到第一次基准时间的第一个时间片时,由共享时间片的第一个线程占用,当系统运行到第2次基准时间的第1个时间片时,由共享时间片的第2个线程占用,如此类推,这种扩展模式可以灵活的掌控线程与所用时间的比例,但是这是以牺牲运行时间为代价的。
结论:本文对单片机控制系统的编程思想作出了扩展,将本属于计算机高级语言编程思想的多线程编程移植到单片机控制系统中。这种方法使单片机控制系统可工作于对系统运行速度要求很高的系统中,并且对其他的高级语言编程思想,如对事件句柄的处理等向单片机控制系统移植起了示范作用。
-
单片机原理及应用: 并行扩展 - RAM#单片机学习硬声知识 2022-11-06
-
单片机原理与应用: 程序存储器并行扩展#单片机学习硬声知识 2022-11-08
-
单片机应用技术:并行扩展线选法#单片机学习硬声知识 2022-11-09
-
单片机应用技术:并行端口P0和P口#单片机学习硬声知识 2022-11-09
-
单片机应用技术:并行端口P和P口#单片机学习硬声知识 2022-11-09
-
单片机与PC机之间并行通讯的一种实现方法2012-08-17 0
-
单片机如何并行通信2014-07-10 0
-
请问各位大神,并行处理是怎么在单片机中实现的?2016-08-09 0
-
基于MCS51系列单片机法人双机并行互连实现2019-04-29 0
-
如何利用单片机高效地并行处理多个外设通信?2019-10-14 0
-
如何实现单片机与PCI总线接口的并行通信?2021-04-29 0
-
如何实现单片机对复杂情景的处理2021-12-01 0
-
单片机的并行I/O口与工作模式介绍2022-02-18 0
-
单片机并行口,单片机并行口结构原理是什么?2010-03-11 3336
-
单片机中并行是什么意思2023-12-20 501
全部0条评论

快来发表一下你的评论吧 !
