

基于FPGA的全新DSC并行译码器设计及理论
FPGA/ASIC技术
描述
摘 要: 采用易于FPGA实现的归一化最小和算法,通过选取合适的归一化因子,将乘法转化成移位和加法运算。在高斯白噪声信道下,仿真该译码算法得出最佳的译码迭代次数,并结合Xilinx XC7VX485T资源确定量化位数。然后基于该算法和这3个参数设计了一种全新的、高速部分并行的DSC译码器。该译码器最大限度地实现了译码效率、译码复杂度、FPGA资源利用率之间的平衡,并在Xilinx XC7VX485T芯片上实现了该译码器,其吞吐率可达197 Mb/s。
0 引言
分布式信源编(DSC)解码较传统信道编解码而言,因其编码简单、译码复杂成为近年来通信领域的研究热点。DSC编码端各信源独立编码,译码端根据信源的相关性联合译码,从而降低了编码的复杂度,而把整个系统的复杂度转移到译码端,所以本文重点研究DSC译码器的设计。
Turbo码和LDPC码是实现DSC译码器的两种主要编码。在DSC译码过程中,Turbo码译码算法复杂、译码延时长且存在一定的不可检测错误,而LDPC码具有较大的灵活性、较低的差错平底特性、译码速度快、具有高效的译码迭代算法[1],因此LDPC码更适合于实现DSC译码器。
LDPC码分为规则LDPC码和非规则LDPC码,非规则LDPC码的译码性能优于规则LDPC码,是目前己知的最接近Shannon限的码[2],所以本文采用非规则LDPC码实现DSC译码器。
本文设计的DSC译码器具有反馈信道,根据当前联合译码的结果把译码判决信息反馈到编码端,但这种方法对实时性要求很高[3],这是限制DSC译码器工程应用的一个重要因素。FPGA由于其强大的数据并行处理能力,能够做到数据处理的实时性、高效性。所以,FPGA能够解决DSC译码器反馈信道实时性的问题。
Log-BP算法、BP-Based算法、归一化最小和(NMS)算法是3种常用的DSC译码算法,这3种算法把一部分乘法用求和运算代替极大地减少了运算量。Log-BP算法修正了码长较长时概率 BP 译码算法计算不稳定的问题,但是仍然存在乘法运算不利于 FPGA实现。BP-Based算法虽然降低了运算量,但BP-Based 算法相对于Log-BP算法收敛速度慢,译码性能也不如前者[4]。NMS算法和BP-Based算法的复杂度几乎相同,若选取合适的归一化因子η,能将乘法用加法和移位操作代替,并且其译码性能与概率BP算法几乎一致[5]。因此,NMS算法在FPGA实现时被大量采用。
基于非规则LDPC码、FPGA、NMS译码算法3方面的优点,本文的主要工作是采用非规则LDPC码、运用NMS译码算法设计了一种全新的、实时高速的DSC译码器并在Xilinx XC7VX485T上实现了该译码器。该译码器的吞吐率可达197 Mb/s,具有较好的工程应用价值。
1 DSC译码器实现的理论基础
1.1 DSC的基本原理
假设Xi(i=1,2…N)是来自同一个系统的N个信源,这N个信源之间的相关性称为边信息,现对这N个信源进行独立编码,将编码后的N路信息传输到同一个译码节点,并结合边信息进行联合译码。因此,DSC系统的编码端极为简单,其复杂度主要体现在译码端。
1.2 基于非规则LDPC码的DSC系统
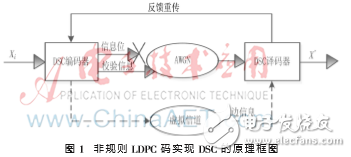
图1是非规则LDPC码实现DSC系统的框图,其中Xi(i=1,2…N)表示来自同一个系统的N个信源,DSC编码器和译码器根据非规则LDPC码的校验矩阵(H矩阵)而设计。
从图1中可知,非规则LDPC码实现DSC编解码系统的基本原理:信源Xi经过DSC编码器后输出信息位和校验信息,与传统译码相比,DSC编解码系统丢弃信息位并且经高斯白噪声(AWGN)信道每次只传输少量的校验位到DSC译码器,如此可以实现码率自适应并提高压缩效率。同时边信息经过虚拟信道传输到DSC译码器进行联合译码,如果此时能够正确译码就输出译码信息X’,否则进行反馈重传校验位继续译码,直至正确译码输出。
1.3 LDPC译码算法
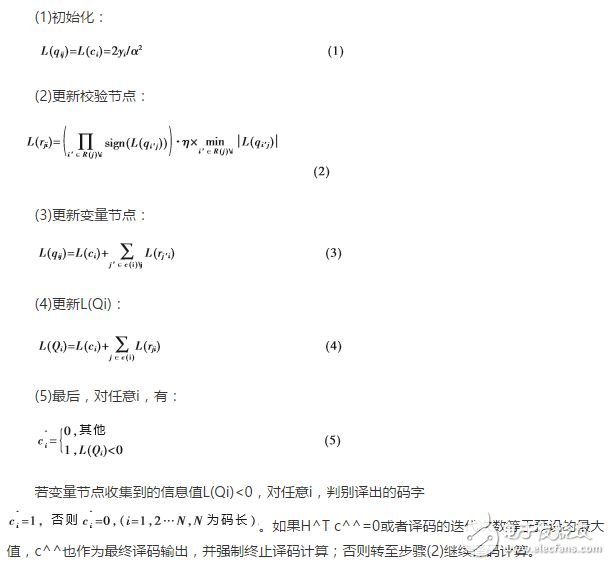
NMS译码算法具体阐述如下:
设α2为AWGN信道的方差,yi表示接收到的信息,L(ci)为信道初始化信息,L(qij)为变量节点接收来自校验节点的信息,L(rji)为校验节点接收来自变量节点的信息,L(Qi)是变量节点接收到的全部信息,C(i)表示连接变量节点i的所有校验节点,C(i)j表示连接变量节点i中除j外的全部校验节点,C(j)i表示连接校验节点j中除i外的全部变量节点,η表示归一化因子。
从式(2)中可以看出NMS算法仍然存在少量的乘法运算,若选取合理的η,则能在不损失译码性能的情况下,将乘法用加法和移位操作代替[5],使译码的计算量最少、译码的复杂度最小、FPGA消耗的资源最少。
η是一个小于1的正常数,通常在FPGA上实现LDPC译码算法时选取η为0.75,此时的NMS算法译码性能最佳[6]。
2 DSC译码器设计
文献[7]对非规则(2 048,1 024)、码率1/2的H矩阵的研究表明该H矩阵在译码过程中能够实现相当低的误码率。因此本文选用此类型度分布为(λ(x),ρ(x)),码率为1/2的非规则H矩阵,其中λ(x)=0.285 6x+0.257 5x2+0.456 7 x7,ρ(x)=0.003 4x5+0.996 6x6。
本文设计的DSC译码器分为输入模块、缓冲模块、节点信息更新模块、判决模块、控制模块、反馈模块、输出模块。图2是DSC译码器的逻辑结构图,该译码器主要模块的功能如下:
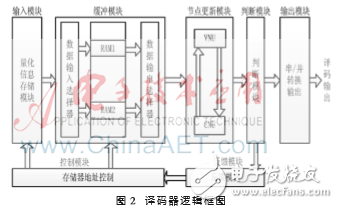
(1)将量化好的边信息、校验位信息存入FPGA Block RAM模块中。
(2)缓冲模块中两个完全相同的RAM块用于乒乓操作,周期性地切换数据选择器可以提高数据传输的速率、效率,亦能使缓冲模块与节点更新模块的速率相匹配。
(3)控制模块用于控制量化信息存储器和缓冲模块的工作时序,保证这两个模块有序工作,保证数据连续。
(4)节点信息更新模块控制变量和校验两类节点的信息更新,并将判决信息输出给判决模块。
(5)反馈模块把判决结果实时反馈到数据输出选择器端,通知输出选择器继续发送校验信息。
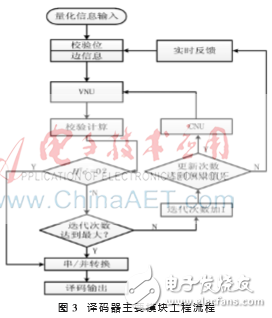
该译码器的设计重点体现在节点更新模块、判决模块和反馈模块。图3是这3个模块的工作流程。
2.1 量化位数及迭代次数设计
量化必然会损失信息,所以量化位数的设计对信息重建至关重要。量化位数越多,则信息损失越少,译码正确性越高,但计算量会增加、消耗的FPGA资源也越多;若量化位数太少,丢失的信息过多,虽然计算量减少、消耗FPGA资源减少,但可能造成译码错误。
文献[8-9]中提出(q,f)均匀量化方案,其中量化位数q=8,因量化精度对译码性能影响很小,故取f=2足矣。鉴于Xilinx XC7VX485T的逻辑资源相对丰富,本文设计了(8,2)、(9,2)、(10,2)、(11,2)4种量化方案,这4种量化方案经ISE布局布线后消耗FPGA中一种重要资源指标Slice Registers的情况如表1所示。

根据面积换“速度”的思想,提高FPGA资源利用率的同时增加译码的准确性。因此,根据表1可知(10,2)均匀量化方案最适合本文DSC译码量化要求。
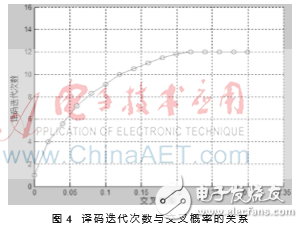
另一个重要的参数是译码迭代次数。通常码长、码率相同时,不同交叉概率对应的译码迭代次数不同。通过仿真AWGN信道下码长2 048、码率1/2、量化位数10 bits的信号,得出交叉概率与译码迭代次数之间的关系,如图4所示。
图4表明,交叉概率变大时,译码迭代次数随之增加。当交叉概率超过0.2后,译码迭代次数不再改变。所以本文设计译码迭代次数的最大值为12。
2.2 变量更新单元设计
从式(3)和式(4)可知,变量节点的更新主要是加法运算。初始信息与校验信息送入VNU更新变量节点并计算出各码位判决控制信息。其原理框图如图5所示,由于H矩阵非规则,所以设计了两种校验信息组合方式。
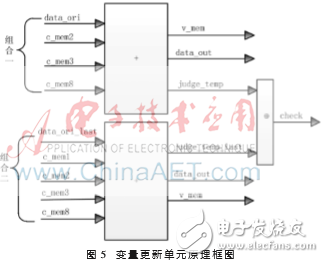
其中,data_ori、data_ori_last表示两种组合状态的初始信息,c_mem1、c_mem2、c_mem3、c_mem8表示分别与度为1、2、3、8的变量节点相连的校验节点信息,v_mem表示更新后的变量节点信息,judge_temp、judge_temp_last表示两种组合状态的中间判决信息,check表示输入判决模块的最终判决信息。
VNU计算完成后,将judge_temp、judge_temp_last进行异或运算得到判决结果check,如果判断结果是0,则表示译码正确,将译码结果送至串/并转换模块输出,否则表示译码错误。
2.3 校验更新单元设计
根据式(2)可知,更新校验节点信息需要求绝对值、求符号、排序找出最小值、移位和加运算这4个步骤。在式(2)中,虽然选择合适的η可以将乘法全部转化成移位和加法运算,但是大量的移位操作会占用过多的时钟周期,因此在CNU模块的移位/加运算中采用“流水移位/加运算”的方式,这样不但提高了时钟利用率、运算效率,也降低了FPGA资源的消耗。
CNU的原理框图如图6所示,由于H矩阵非规则,所以设计了两种变量信息组合方式。
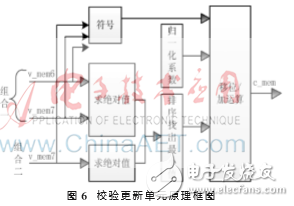
其中,v_mem6、v_mem7分别表示与度为6、7的校验节点相连的变量节点信息, c_mem表示更新后的校验节点信息。
3 DSC译码器设计结果分析
3.1 DSC译码器结构分析
通常情况下,串行译码的译码效率最低,全并行译码器的译码效率最高,但是FPGA有限的逻辑资源限制了这种方法的实用性。为了平衡FPGA资源的利用率和译码器的译码效率,本文采用部分并行的思想设计译码器。
由于本文的H矩阵是非规则的,不同度的节点组合在一起消耗的FPGA资源不一样。综合考虑运算量、FPGA资源、占用时钟周期等因素,设计VNU中组合一、组合二的结构如表2、表3所示。
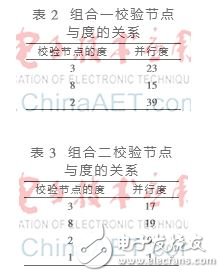
从表2、表3中可以看出组合一的并行度是77,组合二的并行度是46。所以VNU组合一经过26个状态以及VNU组合二经过1个状态可以完全更新变量节点。
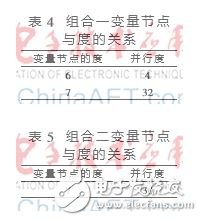
设计CNU中组合一、组合二的结构如表4、表5所示。从表4、表5中可以看出组合一的并行度是36,组合二的并行度是38,所以CNU组合一经过1个状态以及CNU组合二经过26个状态可以完全更新校验节点。
3.2 DSC译码器时序图
为了验证该DSC译码器设计的可行性,在MATLAB中随机产生一段二进制信息序列,先进行LDPC编码,再进行AWGN信道加噪和BPSK调制,得到初始化信息,然后作10 bits均匀量化,将量化结果存入Block RAM中作为译码器输入。
该译码器正确译码一次的主要信号时序图如图7所示(为了清晰地显示信号,故将图中的信号名重写)。信号的含义如下:clk表示译码器的全局时钟,rst表示译码器的全局复位,out_flag表示译码输出标志,out_en表示译码输出使能,iter_counter表示译码迭代次数,check表示译码判决信号,data_out表示译码输出。图7(b)、图7(c)是图7(a)中a、b局部放大后的图。
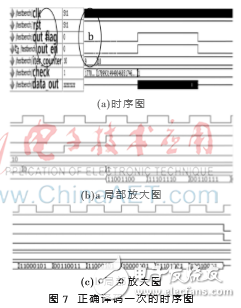
从图7(b)可以看出该译码器经过10次循环迭代后,判决信息输出为0,说明译码器译码正确。对比MATLAB产生的二进制信息序列,表明译码输出结果与产生的二进制信息序列完全一致,至此证明了该译码器设计是正确的。
3.3 DSC系统压缩性能
一般而言,信源的交叉概率越大,正确译码所需的校验位个数越多。为验证本文设计的DSC系统的压缩性能,通过改变信源的交叉概率测试正确译码需要的校验位个数,并与MATLAB中设计的DSC系统对比。本文设计的DSC系统与MATLAB中设计的DSC系统压缩性能对比如图8所示。
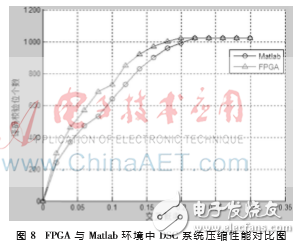
从图8中可知,在FPGA和MATLAB实现的DSC系统中,正确译码所需的校验位个数都随交叉概率增加而增加。当交叉概率相同时,本文设计实现的DSC系统比MATLAB仿真的DSC系统需要更多的校验位才能正确译码,主要原因是受FPGA资源限制导致量化位数不够并且FPGA在布局布线时有延迟。
该DSC高速译码器在Xilinx XC7VX485T上实现,ISE完成布局布线消耗的FPGA资源如表6所示。
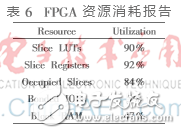
经过时序约束,译码器最大工作频率f可达195.048 MHz,译出一个码字需要169个时钟。根据吞吐率计算公式N×f/(k×T),其中N是码长,f是时钟工作频率,k是最大译码迭代次数,T是译出一个码字的周期,则译码吞吐率可达197 Mb/s。
4 结束语
本文针对当前DSC译码器译码实时性差、译码效率低等因素设计了一种全新的、高速部分并行的DSC译码器,并在Xilinx XC7VX485T芯片上实现,在设计时最大限度平衡了FPGA资源、译码复杂度和译码效率。该DSC译码器的设计具有一般性、便于移植等特点,其高达197 Mb/s的吞吐率,使该DSC译码器具有较强的工程实用性。
-
截短Reed-Solomon码译码器的FPGA实现2009-09-19 0
-
基于IP核的Viterbi译码器实现2010-04-26 0
-
全译码器可作什么使用?2015-05-18 0
-
怎么实现BCH译码器的FPGA硬件设计?2021-06-15 0
-
怎么实现RS编译码器的设计?2021-06-21 0
-
译码器定义2021-12-07 0
-
基于FPGA 的(3,6)LDPC 码并行译码器设计与实现2009-06-06 523
-
译码器,译码器是什么意思2010-03-08 5384
-
基于FPGA的高速RS编译码器实现2012-05-22 947
-
基于FPGA的RS码译码器的设计2013-01-25 960
-
截短Reed_Solomon码译码器的FPGA实现2016-05-11 614
-
基于FPGA 的LDPC 码编译码器联合设计2017-11-22 4012
-
译码器的逻辑功能_译码器的作用及工作原理2018-02-08 108938
-
如何使用FPGA实现跳频系统中的Turbo码译码器2021-04-01 582
-
FPGA之三八译码器2023-04-26 2000
全部0条评论

快来发表一下你的评论吧 !
