

pid算法详细介绍
电子常识
描述
一、PID算法简介
在智能车竞赛中,要想让智能车根据赛道的不断变化灵活的行进,PID算法的采用很有意义。
首先必须明确PID算法是基于反馈的。一般情况下,这个反馈就是速度传感器返回给单片机当前电机的转速。简单的说,就是用这个反馈跟预设值进行比较,如果转速偏大,就减小电机两端的电压;相反,则增加电机两端的电压。
顾名思义,P指是比例(Proportion),I指是积分(Integral),D指微分(Differential)。在电机调速系统中,输入信号为正,要求电机正转时,反馈信号也为正(PID算法时,误差=输入-反馈),同时电机转速越高,反馈信号越大。要想搞懂PID算法的原理,首先必须先明白P,I,D各自的含义及控制规律:
比例P:比例项部分其实就是对预设值和反馈值差值的发大倍数。举个例子,假如原来电机两端的电压为U0,比例P为0.2,输入值是800,而反馈值是1000,那么输出到电机两端的电压应变为U0+0.2*(800-1000)。从而达到了调节速度的目的。显然比例P越大时,电机转速回归到输入值的速度将更快,及调节灵敏度就越高。从而,加大P值,可以减少从非稳态到稳态的时间。但是同时也可能造成电机转速在预设值附近振荡的情形,所以又引入积分I解决此问题。
积分I:顾名思义,积分项部分其实就是对预设值和反馈值之间的差值在时间上进行累加。当差值不是很大时,为了不引起振荡。可以先让电机按原转速继续运行。当时要将这个差值用积分项累加。当这个和累加到一定值时,再一次性进行处理。从而避免了振荡现象的发生。可见,积分项的调节存在明显的滞后。而且I值越大,滞后效果越明显。
微分D:微分项部分其实就是求电机转速的变化率。也就是前后两次差值的差而已。也就是说,微分项是根据差值变化的速率,提前给出一个相应的调节动作。可见微分项的调节是超前的。并且D值越大,超前作用越明显。可以在一定程度上缓冲振荡。比例项的作用仅是放大误差的幅值,而目前需要增加的是“微分项”,它能预测误差变化的趋势,这样,具有比例+微分的控制器,就能够提前使抑制误差的控制作用等于零,甚至为负值,从而避免了被控量的严重超调。
由各个参数的控制规律可知,比例P使反应变快,微分D使反应提前,积分I使反应滞后。在一定范围内,P,D值越大,调节的效果越好。
二、PID调试一般原则
a. 在输出不振荡时,增大比例增益P。
b. 在输出不振荡时,减小积分时间常数Ti。
c. 输出不振荡时,增大微分时间常数Td。
三、pid算法参数调整一般步骤
a.确定比例增益P
确定比例增益P 时,首先去掉PID的积分项和微分项,一般是令Ti=0、Td=0,PID为纯比例调节。输入设定为系统允许的最大值的60%~70%,由0逐渐加大比例增益P,直至系统出现振荡;再反过来,从此时的比例增益P逐渐减小,直至系统振荡消失,记录此时的比例增益P,设定PID的比例增益P为当前值的60%~70%。比例增益P调试完成。
b.确定积分时间常数Ti
比例增益P确定后,设定一个较大的积分时间常数Ti的初值,然后逐渐减小Ti,直至系统出现振荡,之后在反过来,逐渐加大Ti,直至系统振荡消失。记录此时的Ti,设定PID的积分时间常数Ti为当前值的150%~180%。积分时间常数Ti调试完成。
c.确定积分时间常数Td
积分时间常数Td一般不用设定,为0即可。若要设定,与确定 P和Ti的方法相同,取不振荡时的30%。
d.系统空载、带载联调,再对PID参数进行微调,直至满足要求
找三个以上PID算法应用实例,结合实例明确参数调试的方法以及参数的意义,同时给小组成员做介绍
四、pid算法应用环境
当被控对象的结构和参数不能完全掌握,或得不到精确的数学模型时,控制理论的其它技术难以采用时,系统控制器的结构和参数必须依靠经验和现场调试来确定;(由于赛道的参数事先未知,所以只能根据实时采集到的赛道数据控制小车沿着赛道行进)。
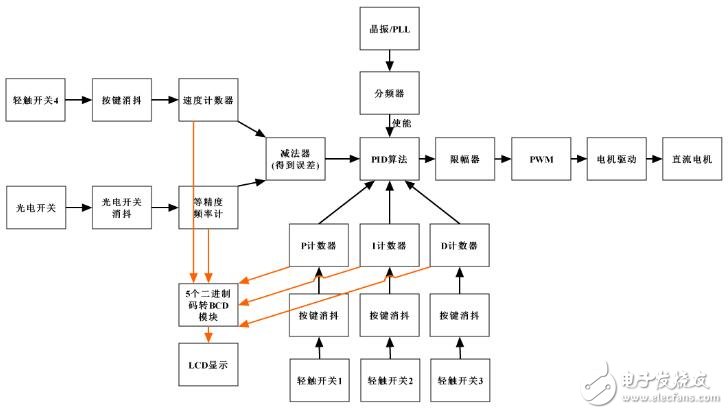
在FPGA中使用PID算法做电机控制的完整框图
五、PID算法原理
在工业应用中PID及其衍生算法是应用最广泛的算法之一,是当之无愧的万能算法,如果能够熟练掌握PID算法的设计与实现过程,对于一般的研发人员来讲,应该是足够应对一般研发问题了,而难能可贵的是,在我所接触的控制算法当中,PID控制算法又是最简单,最能体现反馈思想的控制算法,可谓经典中的经典。经典的未必是复杂的,经典的东西常常是简单的,而且是最简单的,想想牛顿的力学三大定律吧,想想爱因斯坦的质能方程吧,何等的简单!简单的不是原始的,简单的也不是落后的,简单到了美的程度。先看看PID算法的一般形式:
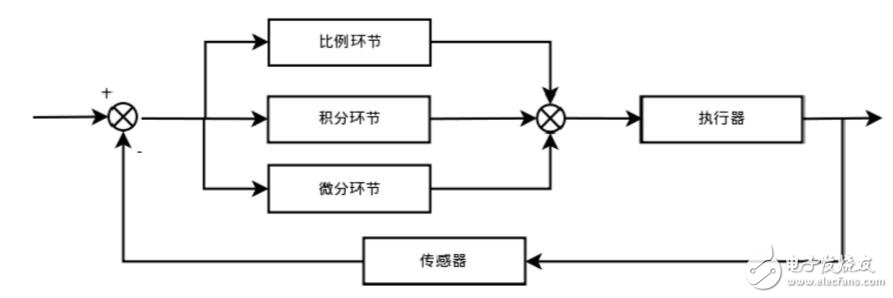
PID的流程简单到了不能再简单的程度,通过误差信号控制被控量,而控制器本身就是比例、积分、微分三个环节的加和。这里我们规定(在t时刻):
1.输入量为rin(t);
2.输出量为rout(t);
3.偏差量为err(t)=rin(t)-rout(t);
pid的控制规律为
理解一下这个公式,主要从下面几个问题着手,为了便于理解,把控制环境具体一下:
1.规定这个流程是用来为直流电机调速的;
2.输入量rin(t)为电机转速预定值;
3.输出量rout(t)为电机转速实际值
4.执行器为直流电机;
5.传感器为光电码盘,假设码盘为10线;
6.直流电机采用PWM调速转速用单位转/min表示;不难看出以下结论:
1.输入量rin(t)为电机转速预定值(转/min);2.输出量rout(t)为电机转速实际值(转/min);3.偏差量为预定值和实际值之差(转/min)
六、PID算法应用——线性控制原理
PID控制的三要素:控制器,被控对象,反馈器。控制器就是一个数学模型,就PID来说,等同于PID算法。是对反馈量的一个处理与输出。通俗的说就是对于每个被控的量,我的输出量通过什么函数式算出,或者说,我如何描述我的输出量。现在我给定一个描述性的传递函数。从数学角度来看:它的自变量是反馈值,当这个函数的对应关系确定了之后,输出量就是个定值了。我的希望是:这个描述函数是一个透明的空箱——它既能反映系统外部特性,又可以看到其内部结构。
就拿比赛来说:假设我现在要构建这样一个闭环系统,这个系统的反馈调节建立了一个描述函数,最根本的在于:
1 这个系统的动态性从根本上讲取决于哪些因素;2这些因素如何决定系统的性能;
数学模型的描述:1 描述函数-》微分方程。描述函数的自变量与因变量满足微分方程。(瞬间变化的关系式)
2 将微分方程做一个处理,得出其特征方程,这个特征方程称作描述函数的极点。
ps:下面简述一下极点和零点。对描述函数做拉普拉斯变换,将描述函数变换成一个与它本身相关的函数,并找出其通解和特解,通解是这个函数的开环特征,用来描述输出与输入的关系,零点是调节变量,用于闭环中对系统反馈参数的调节。(对函数做拉普拉斯变换事实上是针对描述大多函数是常微分方程的一种现象)
我们有必要对这个描述函数的解进行研究,尽管在线性控制原理中并不关注并不要求去了解他,但是对于这个常微分方程的极点形式的了解有助于我们认识这个描述函数的物理意义。这是高数的知识,就不再累述。通过求解,可以看到极点其实就是这个经过拉普拉斯变换的描述函数的一次项的系数,零点是反馈量的相关函数的系数。也就是说,极点一旦确定,这个函数也就确定了,对于每一个输入函数,赋予零点变换,再进过极点变换 ,最后生成输出量。
把我们现在得到的结论联系一下:对于一个闭环的系统我们通过对控制器一些参数的理论求解,或者说调试求解,最终改变输出变量,从而使这个系统持续稳定。也就是说,在控制器内,存储了有关于反馈值某种预期的实现方法,这些方法用一些固定的参数来描述,然后输出变量改变系统的状态。我的任务是调试这些具有物理意义的参数。
下面是一个简单的PID程序设计:
double kp,ki,kd;
double resultfunc(void)
{
double error;
double diff;
double lasterror = 0;
error = target - input;
sumerror += error;
diff = error - lasterror;
lasterror = error;
output = kp * error + ki * sumerror + kd * diff;
return output;
}
你会发现其实想象中的PID要比现实中的PID复杂很多,这是理所当然的,因为经过PID数学计算之后,带入的公式只是一个近似量。但是这可不是随便瞎设的一个值,最重要的是,你需要数学计算。
不得不说一下,对于一个完全的门外汉来说,PID是一个十分高神的名词,很多人一上手就接触PID,结果连输出输入的到底是什么都搞不明白,其实不妨接触一下线性控制的理论,这对于你的视野和思路有及其清晰的指导。
参数整定寻最佳,从小到大顺序查;
先是比例后积分,最后才把微分加;
曲线振荡很频繁,比例度盘要放大;
曲线漂浮绕大弯,比例度盘往小扳;
曲线偏离回复慢,积分时间往下降;
曲线波动周期长,积分时间再加长;
曲线振荡变很快,先把微分降下来;
动差大来波动慢,微分时间要加长;
联想曲线两个波,前高后低4比1;
一看二调多分析,调节质量不会低。
- 相关推荐
- PID算法
-
【最新课程推荐】PID控制算法2016-10-12 0
-
PID算法详细介绍!!!2013-07-28 0
-
谁有PID算法的详细资料2014-07-26 0
-
赛前恶补PID算法的看这两份资料就够了!2015-08-11 0
-
位置式PID介绍2021-09-10 0
-
用PID算法调温的经验2021-11-23 0
-
pid算法_什么是pid算法2012-01-01 10719
-
PID算法资料_整理版2016-07-21 587
-
数字PID及其算法2016-07-29 508
-
关于PID算法2016-10-27 449
-
四轴PID控制算法详解(单环PID、串级PID)2017-08-29 1475
-
PID程序算法的详细资料概述免费下载2018-07-24 882
-
数字PID控制算法教程之如何对标准PID算法进行改进2018-12-04 2415
-
各类PID算法的资料合集免费下载2019-01-23 1212
-
使用单片机和Arduino实现增量式PID位置式PID算法和PID库免费下载2020-05-28 1518
全部0条评论

快来发表一下你的评论吧 !
