

模拟PID调节器的设计
模拟技术
描述
PID调节规律是自动控制系统中常见而典型的控制策略,其中模拟式PID器是最基本的实现手段与方式。它由比例、积分、微分三种基本电路所构成。根据不同的需求可构成比例(P)调节、比例积分(PI)调节、比例微分(PD)调节、比例积分微分(PID)调节电路。P调节的特点是有差调节,调节器动作快,对干扰能及时和有很强的抑制作用。I调节的特点是能消除静态偏差。D调节作用是超前的调节作用,有利于克服动态偏差。借助Multisim10仿真软件对P、PI、PD、PID调节电路以及调节功能选择电路单元作了功能上的仿真,圆满实现了对模拟式PID调节电路的研究。
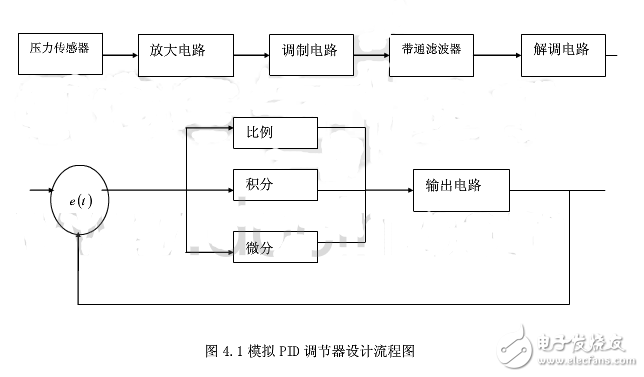
对压力传感器是施加适当大小的压力,压力传感器可以把压力转换成毫伏级的差模电压信号。因为传感器输出的信号很小,所以得进行放大。因为放大的信号除测量信号外,还往往有各种噪声,为了便于区别信号与噪声,往往给测量信号赋予一定的特征,这就需要调制电路。带通滤波器是一个允许特定频段的波通过,可以滤去高频信号和低频信号。将滤出的信号输入解调电路进行解调,从而得到需要的信号。然后将信号输入PID调节器的设计电路,分别经过输入电路,比例微分电路、比例积分电路和输出电路。取出输出电路输出的信号,将其反馈到输入电路,与给定的信号进行比较,使得偏差e(t)尽可能的小。
传感器的选择
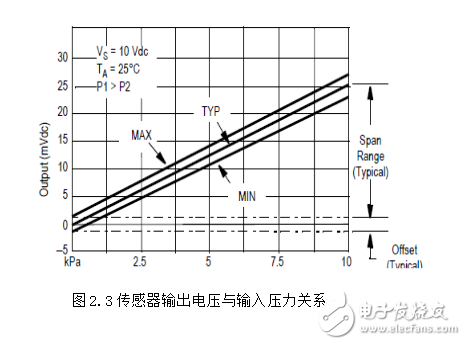
MPX2100半导体压力传感器可以把压力转换成毫伏级的电压信号,该压力传感器具有良好的线性度,它的输出电压与所加压力成精确的正比例关系。另外,MPX2100所具有的温度补偿特性克服了半导体压力敏感器件存在温度漂移问题,因而具有广阔的应用前景。
1 工作原理
MPX2100是一种压阻式压力传感器,在硅基片上用扩散工艺制成 4个电阻阻值相等的应变元件构成惠斯顿电桥。电桥有恒压源供电和恒流源供电两种供电方式。采用恒压源供电的原理图如图 1所示。
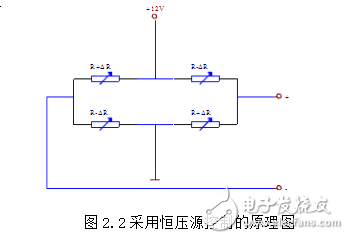
当压力传感器受到压力作用时,一对桥臂的电阻值增大∆R,另一对桥臂的电阻值减少∆R,电阻变化量∆R与压力成正比,即 ∆R=KP,电桥输出电压U=E(△R/R)=(EK/R)P,即电桥输出电压与压力 P成正比,如下图所示:
放大电路的选择
定义
在测量控制系统中,用来放大传感器输出的微弱电压、电流或电荷信号的电路称为测量放大电路。
2测量放大电路的选择
测量放大电路的结构形式是由传感器的类型决定的。例如,电阻应变式传感器通过电桥转换电路输出信号,并且用差动放大器进一步放大,因此电桥放大电路就是其测量放大电路。
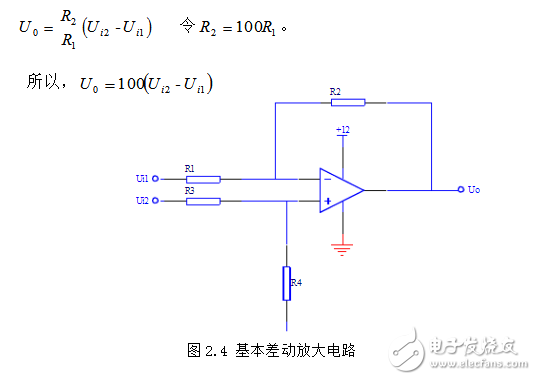
差动放大电路是把两个输入信号分别输入到运算放大器的同相和反相输入端,然后在输出两个信号的差模信号,而尽量抑制两个信号的共模成分的电路。采用差动放大电路,有利于抑制共模干扰和减小温度漂移。其电路图如下:
调制电路的选择
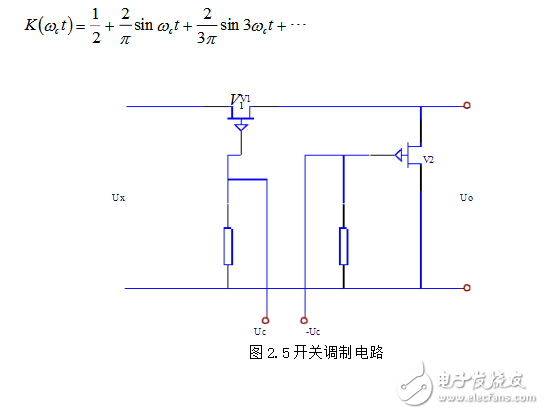
选用开关电路进行调制,在输入端加入调制信号xu,21VV, 是两个场效应晶体管,工作在开关状态。在它们的栅极分别加入高频载波方波信号cU,cU。当cU为高电平、cU为低电平时,V1导通、V2截止。若V1、V2为理想开关,输出电压Xuuo。当cU为低电平、cU为高电平时,V1截止、V2导通,输出为零。经过调制xu与幅值按0、1变化的载波信号相乘。归一化的方波正弦载波信号按傅里叶级数展开后可写
带通滤波器
定义
带通滤波器是一个允许特定频段的波通过同时屏蔽其他频段的设备。
工作原理
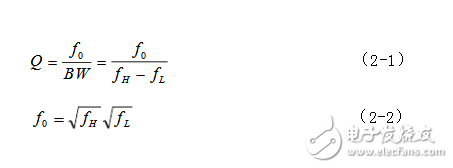
带通滤波器是一个允许特定频段的波通过同时屏蔽其他频段的设备 比如RLC振荡回路就是一个模拟带通滤波器 一个理想的带通滤波器应该有平稳的通带(bandpass,允许通过的频带),同时限制所有通带外频率的波通过 但是实际上,没有真正意义的理想带通滤波器 真实的滤波器无法完全过滤掉所设计的通带之外的频率信号,在理想通带边界有一部分频率衰减的区域,不能完全过滤,这一曲线被称做滚降斜率(roll-off) 滚降斜率通常用dB度量来表示频率的衰减程度 一般情况下,滤波器的设计就是把这一衰减区域做的尽可能的窄,以便该滤波器能最大限度接近完美。通带的设计与带通滤波器的中心频率0f和带宽 BW 之间的关系为:
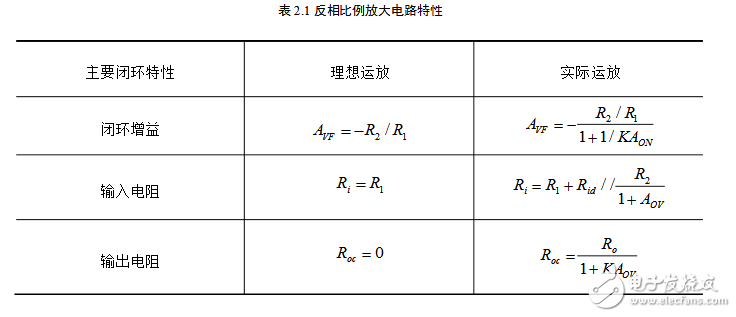
反相比例电路由运放组成的反相输入比例放大电路如图2.1所示。在理想条件下,该电路的主要闭环特性如表2.1所示。在表中1利用上表可计算出运算误差。表2.1说明,由运放组成的反相输入比例放大电路具有如下重要特性
(1)在深度负反馈情况下工作时,电路的放大倍数仅有外接电阻R1、R2的值确定。
(2)因同相端接地,则反相电位为“虚地”,因此,对前级信号源而言,负载不是运放本身的输入电阻,而是电路的闭环输入电阻R1。
(3)运放的输出电阻也由于深度负反馈而大为减小。由于R1=R2这一特点,反相比例放大器只宜用于信号源对负载电阻要求不高的场合(小于500kΩ)。
在设计反相比例放大电路时,要从多种因素来选择运放参数。PID调节电路的输入输出要求为:输入1~5V的电压信号,输出5~20mA的电流。由于运算放大器的工作电压为±15V,因此比例放大的增益不能超过3,R2与R1的比值也就不能超过3。
比例微分电路
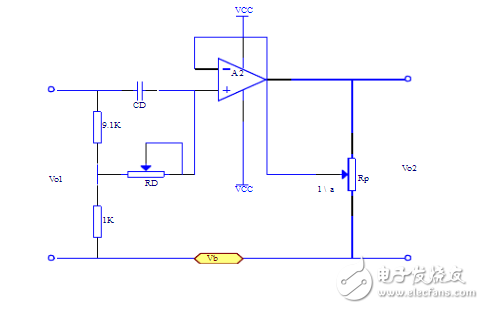
主要作用:以bV电平为基准的偏差信号1Vo,通过电路进行比例微分运算,再经比放大后,其输出信号2Vo 送给比例积分电路。分析:用运算法对电路进行分析。由于分压电阻(9.1k 和1k)比RD 小得多,计算时可只考虑其分压比(n)而不考虑其输出阻抗
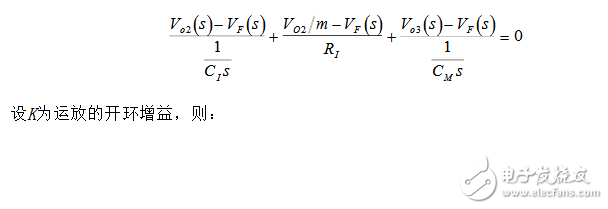
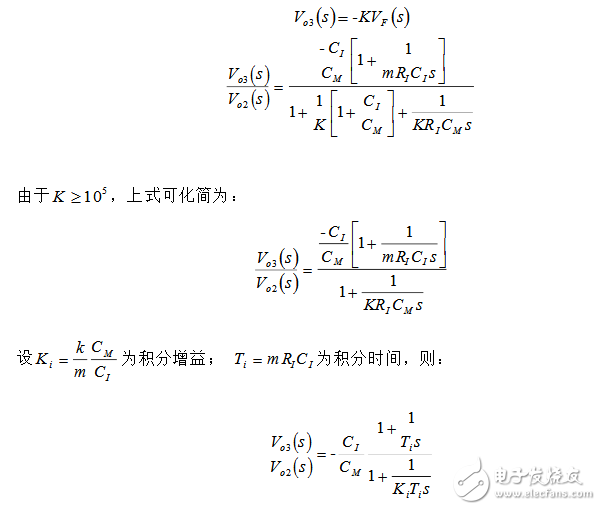
比例积分调节(PI调节)
分析:用运算法对电路进行分析。由于分压电阻(9.1k 和1k)比IR小得多,计算时可只考虑其分压比(m)而不考虑其输出阻抗。这样,对运放反相输入端,有:
比例环节对控制性能的影响
比例增益pK能及时地反映控制系统的偏差信号,系统一旦出现了偏差,比例环节立即产生调节作用,使系统偏差快速向减小的趋势变化。当比例增益pK越大,PID 控制器调节速度越快。但pK不能太大,过大的比例增益会加大调节过程的超调量,从而降低系统的稳定性,甚至可能造成系统的不稳定
积分环节对控制性能的影响
积分环节可以消除系统稳态误差,提高系统的无差度,以保证实现对设定值的无静差跟踪。假设系统己经达到闭环稳定状态,当且仅当e (t ) = 0时,控制器的输出才为常数。由此可见,只要被控系统存在动态误差,积分环节就产生作用。直到系统无差时,积分环节的输出为一个常值,积分作用停止。积分作用的强弱取决于积分时间常数iT的大小,iT越小,积分作用越强,反之则积分作用弱。积分作用的引入会使系统稳定性下降,动态响应变慢。在实际过程中,尤其对大滞后、慢时变对象,积分作用对超调量的贡献是很重要的。
微分环节对控制性能的影响
微分环节的引入,主要是为了改善控制系统的响应速度和稳定性。微分作用反映的是系统偏差的变化律,它可以预见偏差变化的趋势,具有超前的控制作用。换言之,微分作用能在偏差还没有形成之前,就将其消除。因此,微分作用可以改善系统的动态性能。微分作用反映的是变化率,当偏差没有变化时,微分环节的输出为零。微分作用的强弱取决于微分时间dT的大小,dT 越大,微分作用越强,反之则越弱。在微分作用合适的情况下,系统的超调量和调节时间可以被有效的减小。微分作用对噪声干扰有放大作用,所以我们不能过强地增加微分调节,否则会对控制系统抗干扰产生不利的影响。当然,PID 调节电路也存在一定的局限性。常规PID 控制是建立在知道被控对象精确的数学模型的基础之上,只要调试整定好PID控制器参数dipKKK,,后,便可投入生产运行,具有结构简单、稳定性能好、可靠性高、其控制原理与控制技术己完善成熟,且为现场工作人员和设计工程师们所熟悉等优点,但在实际工业过程控制中却存在这样的情况:
(1)许多被控过程机理较复杂,具有非线性、慢时变、纯滞后等特点,这样就很难得到确切的描述这些过程的传递函数或状态方程。
(2)在噪声、负载扰动和其他一些环境条件变化的影响下,过程参数会发生变化。采用常规PID 控制器,以一组固定不变的PID 参数去适应参数变化、干扰等众多的变化因素,显然难以获得满意的控制效果。当参数变化超过一定的范围时,系统性能就会明显变差,致使PID 控制难以发挥作用而无法适用。
本文对 PID 调节器各硬件电路的分析,通过分析,得出了PID 调节方式的优点,即:(1)原理简单,使用方便(2)适应性强(3)鲁棒性强。作为在工业控制中最常用的控制方式,模拟PID 调节器具有强大的生命力,并逐渐发展出许多基于PID 的其它先进的控制方式,例如: 模糊免疫PID 控制、模糊自适应整定PID 控制、专家PID 控制等等,应该说对该种调节方式的研究已经到了成熟的阶段,现行的各种算法已经可以满足工业控制的需要。但是,对于一些特殊的行业,例如军事工业、航天工业等,则需要一些复杂的算法才能满足控制的需要。这是自动化学科人员今后重点的研究对象。
-
PID调节器的正作用和反作用2018-01-03 0
-
PID调节器使用经验分享2018-01-04 0
-
智能调节器调校该用哪个国家标准?2018-01-05 0
-
PID调节器的PID与PLC的PID异同及特点2018-01-06 0
-
用于C语言的PID调节器的SW?2019-01-28 0
-
用于蒸馏器的PID调节器2022-07-18 0
-
数字PID调节器在simulink中是对应discrete PID controller吗?2023-03-17 0
-
数字式PID温度调节器回路设计与应用2010-11-04 527
-
PID调节器参数优化设计的改进方法2011-07-18 1895
-
A_PID调节器的调节过程及其参数的整定方法2016-03-31 1001
-
PID调节器参数的继电自整定方法2016-03-31 662
-
PID调节器的开环和闭环校验2020-07-13 3048
-
改进的足球机器人PID调节器设计2021-03-26 656
-
pid调节器的三个重要参数 pid调节器工作原理2023-03-25 16194
-
pid调节器是什么 pid调节器有哪三部分组成2023-03-25 3271
全部0条评论

快来发表一下你的评论吧 !
