
资料下载


×
CAN-bus汽车驾驶状态测量节点设计方案
消耗积分:0 |
格式:rar |
大小:0.6 MB |
2017-11-27
分享资料个
控制器局域网CAN(Controller Area Network)是国际上应用最广泛的现场总线之一。CAN最初被设计作为汽车环境中的控制总线,在车载各电子控制装置(ECU)之间交换信息,形成汽车电子控制网络。如在发动机管理系统、变速箱控制器、仪表装备、电子主干系统中,均嵌入CAN控制装置[1]。CAN 总线具有实时性强、传输距离远、抗电磁干扰能力强、成本低等优点,以其高性能、高可靠性和独立的设计而被广泛应用于汽车工业、航空工业、工业控制、安全防护等领域。
本文提出了一种以Philips LPC2119为控制器的汽车驾驶状态测量节点的设计, iCAN-bus协议的应用使汽车驾驶状态(方向盘、油门、刹车和ECU控制等信息)的采集、处理和信息管理更具实时性和高效性。经实验测试,该控制系统数据传输快速、准确。
1 CAN总线系统组成模式
1.1 基于iCAN协议的CAN网络
在本文的系统中,采用自主研发的iCAN协议作为本系统的应用协议[2]。iCAN协议是基于CAN的内部通信协议,该协议小巧、通信效率高,对硬件资源要求低,非常适合于小型系统的使用。系统中的设备统称为iCAN节点。iCAN协议定义的通信方式是“面向节点,基于连接”的通信方式。“面向节点”是指源节点地址及目的节点地址均已给定,即对于任何一个报文参与通信的双方是确定的。如图1所示。
“基于连接”是指在网络中任何一个参与通信的从站设备都必须和主站设备之间建立一个独立的通信连接。这样也为对任何一个设备的通信进行监控提供了可能。如图2所示。

1.2 设备的通信模式
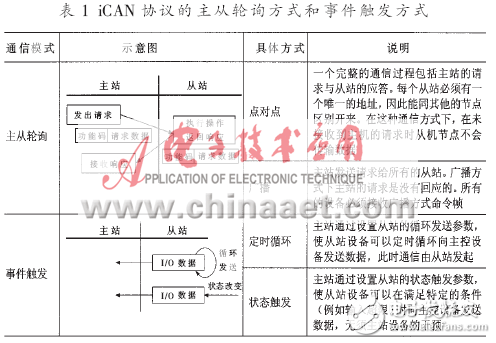
iCAN协议定义了两种通信方式:主从轮询方式和事件触发方式。主从轮询方式又可分成点对点方式和广播方式;事件触发方式又可分成定时循环方式和状态触发方式。如表1所示。
1.3 实际的iCAN系统设计
在本文设计中,采用分布式处理的思想,每个从节点都能完成一些数据处理工作。例如,在加速度的数据采集中,相应从站完成数据的采集、调理、有效数据的判断等。这样,减轻了主节点的工作量,减少了通信次数从而能进一步提高通信质量。
在通信模式上,采用主从轮询和事件触发相结合的方式。在有从节点采集到有效数据的时候才主动向主节点报告,在通常情况下是没有任何动作的。之所以还需要主从轮询模式是基于以下原因。从节点如果长时间没有向主节点发送数据,有两种可能:第一,的确没有数据;第二,该节点已经损坏。在节点损坏的情况下,不会有任何数据发出,所以主节点必须定时查询从节点的状态,这个查询周期可以设置得比较长,视具体要求而定(典型值在几百毫秒到几秒)。对于损坏的从节点,主站会及时向用户报警。
系统由上位计算机节点(包括嵌入式PC机和CAN接口卡)作为系统的主节点,汽车驾驶状态智能测控节点等作为从节点组成。网络拓扑结构为总线型,通信介质为屏蔽双绞线。主节点除了负责与从节点的基本通信外,还负责运行汽车驾驶状态(疲劳驾驶)智能控制程序,动态显示各节点的工作状态和重要的现场参数以及报警信息等,并对各节点的控制参数、运行参数进行整定和修改。系统结构如图3所示。从节点对方向盘、油门、刹车和ECU控制等信息进行采集并传至主节点。对于不同的设备,其总线转换接口原理相同,只是具体的转换模块不同。
本文提出了一种以Philips LPC2119为控制器的汽车驾驶状态测量节点的设计, iCAN-bus协议的应用使汽车驾驶状态(方向盘、油门、刹车和ECU控制等信息)的采集、处理和信息管理更具实时性和高效性。经实验测试,该控制系统数据传输快速、准确。
1 CAN总线系统组成模式
1.1 基于iCAN协议的CAN网络
在本文的系统中,采用自主研发的iCAN协议作为本系统的应用协议[2]。iCAN协议是基于CAN的内部通信协议,该协议小巧、通信效率高,对硬件资源要求低,非常适合于小型系统的使用。系统中的设备统称为iCAN节点。iCAN协议定义的通信方式是“面向节点,基于连接”的通信方式。“面向节点”是指源节点地址及目的节点地址均已给定,即对于任何一个报文参与通信的双方是确定的。如图1所示。
“基于连接”是指在网络中任何一个参与通信的从站设备都必须和主站设备之间建立一个独立的通信连接。这样也为对任何一个设备的通信进行监控提供了可能。如图2所示。
1.2 设备的通信模式
iCAN协议定义了两种通信方式:主从轮询方式和事件触发方式。主从轮询方式又可分成点对点方式和广播方式;事件触发方式又可分成定时循环方式和状态触发方式。如表1所示。
1.3 实际的iCAN系统设计
在本文设计中,采用分布式处理的思想,每个从节点都能完成一些数据处理工作。例如,在加速度的数据采集中,相应从站完成数据的采集、调理、有效数据的判断等。这样,减轻了主节点的工作量,减少了通信次数从而能进一步提高通信质量。
在通信模式上,采用主从轮询和事件触发相结合的方式。在有从节点采集到有效数据的时候才主动向主节点报告,在通常情况下是没有任何动作的。之所以还需要主从轮询模式是基于以下原因。从节点如果长时间没有向主节点发送数据,有两种可能:第一,的确没有数据;第二,该节点已经损坏。在节点损坏的情况下,不会有任何数据发出,所以主节点必须定时查询从节点的状态,这个查询周期可以设置得比较长,视具体要求而定(典型值在几百毫秒到几秒)。对于损坏的从节点,主站会及时向用户报警。
系统由上位计算机节点(包括嵌入式PC机和CAN接口卡)作为系统的主节点,汽车驾驶状态智能测控节点等作为从节点组成。网络拓扑结构为总线型,通信介质为屏蔽双绞线。主节点除了负责与从节点的基本通信外,还负责运行汽车驾驶状态(疲劳驾驶)智能控制程序,动态显示各节点的工作状态和重要的现场参数以及报警信息等,并对各节点的控制参数、运行参数进行整定和修改。系统结构如图3所示。从节点对方向盘、油门、刹车和ECU控制等信息进行采集并传至主节点。对于不同的设备,其总线转换接口原理相同,只是具体的转换模块不同。

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章







