

倒立摆是什么_倒立摆有什么用
电子常识
描述
倒立摆控制系统(InvertedPendulumSystem简称IPS)是一个复杂的、不稳定的、非线性系统,是进行控制理论教学及开展各种控制实验的理想实验平台。对倒立摆系统的研究能有效的反映控制中的许多典型问题:如非线性问题、鲁棒性问题、镇定问题、随动问题以及跟踪问题等。通过对倒立摆的控制,用来检验新的控制方法是否有较强的处理非线性和不稳定性问题的能力。同时,其控制方法在军工、航天、机器人和一般工业过程领域中都有着广泛的用途,如机器人行走过程中的平衡控制、火箭发射中的垂直度控制和卫星飞行中的姿态控制等。
倒立摆的含义
倒立摆的本质是以一个支点支撑起一个物体的状态,这个状态通常是不稳定的。
倒立摆是个物理设备,它包括一个圆柱体的棒子(通常是铝的)可以在一个支点周围振荡。这个支点是安在一个车架上,它的转动方向是水平的偏转。小车是由一个马达控制的,它可以运用于一个变力。棒子会有自然的趋势从最高的竖直位置下落,那是一个不稳定的平衡位置。
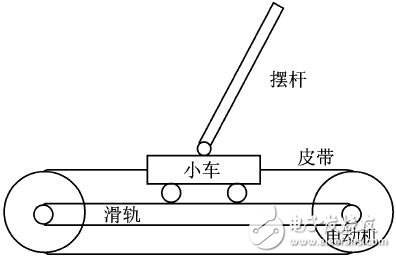
一级倒立摆结构简图
倒立摆控制系统分类
倒立摆系统按摆杆数量的不同,可分为一级,二级,三级倒立摆等,多级摆的摆杆之间属于自由连接(即无电动机或其他驱动设备)。
分类标准可以形象的表示为当一个人用手托起一个竹竿使他不倒,类似这种系统就是一个一级倒立摆系统,通过对竹竿的底端的移动让竹竿的重心维持在它的正下方附近摆动,形成一个动态的平衡,使竹竿不会倒下来,如果在这个竹竿上面再顶一个竹竿,使两个竹竿都立在手上不倒(其中一个顶在另一个的上面),这样的系统就叫二级倒立摆系统,倒立摆级别越高,叠起来的竹竿就越多也越难以控制。
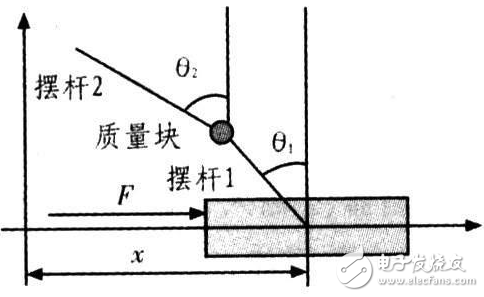
二级倒立摆结构简图
倒立摆的作用
实时倒立摆通常被作为一个基准,去测试软件在状态空间控制器运算法则下的有效性和性能,也就是实用的操作系统。事实上运算法则是通过数值点实现的该数值点看作一组互助的协同操作的任务,它是周期性的通过核心的活动,它执行不同的计算。这些任务如何活动的方法(举例来说激活命令)被称作任务的时序安排。很明显每个任务的时序安排对控制器的一个好的性能是至关紧要的,因此对一个摆的稳定性是有效的。如此倒立摆在决定是否一个特殊的时序安排的选择比另一个好,在哪个情形下,在什么程度内等问题上是非常有用的。
研究倒立摆系统具有的挑战意义不仅仅是由于级数的增加而产生的控制难度,并且由于他的本身所具有的复杂性、不稳定性以及非线性的特点进而不断研究拓展的新的理论方法,以应用到新的控制对象中,提供更好的实验理论和实验平台。对于机器人的直立行走,航天飞行器的飞行平稳控制都具有非常大的意义,不断进行理论与工业的实践结合,推动科学技术的发展,更加广泛的应用到经济活动中。这对于航空航天技术的进步具有非常大的理论意义和实际意义,具有非常广阔的研究前景。
- 相关推荐
- 倒立摆
-
简易旋转倒立摆及控制装置2013-09-04 0
-
简易旋转摆倒立控制装置2013-09-05 0
-
倒立摆的转轴选择2013-09-05 0
-
二级倒立摆小车2013-10-28 0
-
单级倒立摆,求助2014-03-22 0
-
谁有倒立摆的程序2015-06-09 0
-
你们做倒立摆时对倒立摆进行建模了吗?2015-07-29 0
-
怎么用单片机很好控制倒立摆呢2015-08-01 0
-
【IntoRobot Neutron试用体验】使用Neutron实现倒立摆的初步倒立2017-06-29 0
-
关于倒立摆的pid参数调节问题2017-07-27 0
-
模糊控制倒立摆程序2018-10-04 0
-
一级倒立摆matlab仿真,一级倒立摆的Simulink仿真 精选资料分享2021-09-01 0
-
倒立摆系统简介2021-09-01 0
-
关于倒立摆的问题描述2021-09-07 0
-
倒立摆该如何去实现呢2021-12-23 0
全部0条评论

快来发表一下你的评论吧 !
