
资料下载


×
基于EKF的异步电机DTC系统的仿真研究
消耗积分:0 |
格式:rar |
大小:0.3 MB |
2017-12-06
分享资料个
为了提高直接转矩控制(DTC)系统定子磁链估计精度,降低电流、电压测量的随机误差,提出了一种基于扩展卡尔曼滤波(EKF)实现异步电机转子位置和速度估计的方法。扩展卡尔曼滤波器是建立在基于旋转坐标系下由定子电流、电压、转子转速和其它电机参量所构成的电机模型上,将定子电流、定子磁链、转速和转予角位置作为状态变量,定予电压为输入变量,定子电流为输出变量,通过对磁链和转速的闭环控制提高定子磁链的估计精度,实现了异步电机的无速度传感器直接转矩控制策略,仿真结果验证了该方法的可行性,提高了直接转矩的控制性能。
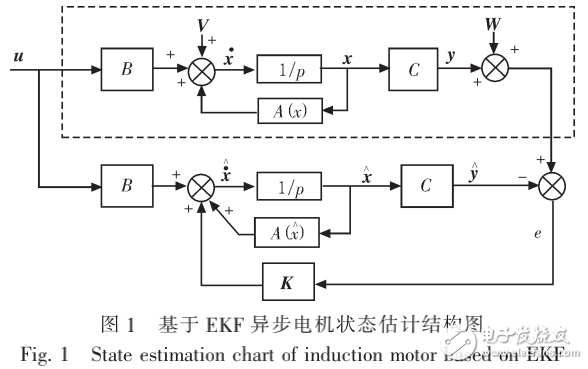
图1上半部分的虚框内表示的是电动机实际状态,下半部分是EKF状态估计框图,符号““’表示状态矢量估计,K为EKF增益矩阵。

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章





