

三轴陀螺仪MPU3050驱动程序分析
控制/MCU
描述
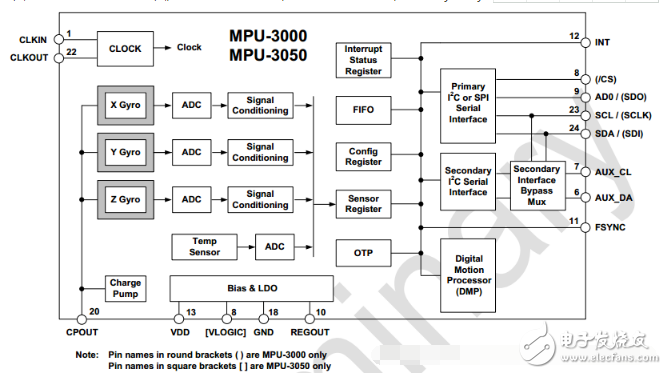
MPU3050是invensense公司的三轴陀螺仪芯片,三轴陀螺仪最大的作用就是“测量角速度,以判别物体的运动状态,所以也称为运动传感器。
下图是MPU3050的系统框图,芯片有1个中断引脚,可以通过i2c来控制,获取xGyro,yGyro,zGyro
设备驱动中用mpu3050_sensor结构体来描述MPU3050设备对象(对象中包含i2c客户端及输入设备来处理获取的x,y,z轴数据的传递)
structmpu3050_sensor{//mpu3050传感器
structi2c_client*client;//i2c客户端
structdevice*dev;//设备文件
structinput_dev*idev;//输入设备
};
用axis_data来描述获取的xGyro,yGyro,zGyro的数值
structaxis_data{//轴数据
s16x;//x轴
s16y;//y轴
s16z;//z轴
};
首先注册i2c设备
module_i2c_driver(mpu3050_i2c_driver);
staticstructi2c_drivermpu3050_i2c_driver={
.driver={
.name=“mpu3050”,
.owner=THIS_MODULE,
.pm=&mpu3050_pm,
.of_match_table=mpu3050_of_match,
},
.probe=mpu3050_probe,//i2cprobe方法
.remove=__devexit_p(mpu3050_remove),
.id_table=mpu3050_ids,
};
i2c设备与驱动匹配需要在板级驱动中注册i2c驱动
htconemax板的做法如下
staticstructi2c_board_info__initdatampu3050_GSBI12_boardinfo[]={
{
I2C_BOARD_INFO(“mpu3050”,0xD0》》1),
.irq=PM8921_GPIO_IRQ(PM8921_IRQ_BASE,PM_GYRO_INT),
.platform_data=&mpu3050_data,
},
};
然后调用
i2c_register_board_info(MSM8064_GSBI2_QUP_I2C_BUS_ID,
mpu3050_GSBI12_boardinfo,
ARRAY_SIZE(mpu3050_GSBI12_boardinfo));
注册i2c板级信息
设备匹配后调用mpu3050_probe方法
staticint__devinitmpu3050_probe(structi2c_client*client,conststructi2c_device_id*id)
{
structmpu3050_sensor*sensor;//mpu3050传感器
structinput_dev*idev;//输入设备
intret;
interror;
sensor=kzalloc(sizeof(structmpu3050_sensor),GFP_KERNEL);//分配mpu3050数据
idev=input_allocate_device();//分配输入设备
if(!sensor||!idev){
dev_err(&client-》dev,“failedtoallocatedriverdata\n”);
error=-ENOMEM;
gotoerr_free_mem;
}
sensor-》client=client;//捆绑i2c客户端
sensor-》dev=&client-》dev;//捆绑设备文件
sensor-》idev=idev;//捆绑输入设备
mpu3050_set_power_mode(client,1);//设置设备正常电压模式
msleep(10);//睡眠
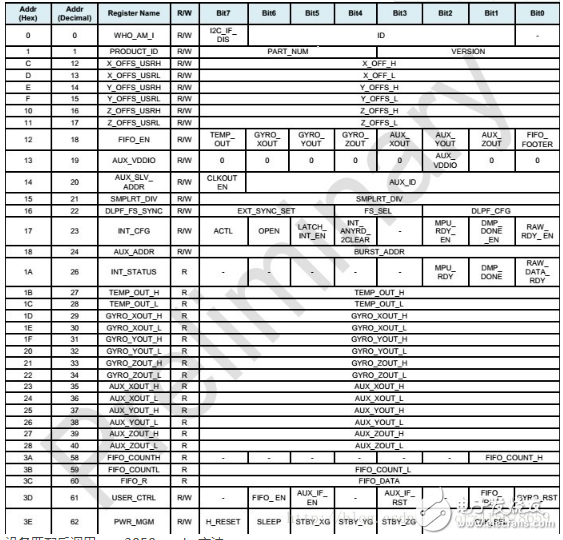
ret=i2c_smbus_read_byte_data(client,MPU3050_CHIP_ID_REG);//获取0x00寄存器值
if(ret《0){
dev_err(&client-》dev,“failedtodetectdevice\n”);
error=-ENXIO;
gotoerr_free_mem;
}
if(ret!=MPU3050_CHIP_ID){//判断芯片ID值(0x69)是否MPU3050
dev_err(&client-》dev,“unsupportedchipid\n”);
error=-ENXIO;
gotoerr_free_mem;
}
idev-》name=“MPU3050”;//设置输入设备名
idev-》id.bustype=BUS_I2C;//输入设备使用i2c总线
idev-》dev.parent=&client-》dev;//设置i2c设备为输入设备父设备
idev-》open=mpu3050_input_open;//输入设备打开方法
idev-》close=mpu3050_input_close;//输入设备关闭方法
__set_bit(EV_ABS,idev-》evbit);//设置绝对位移事件标志位,设置各轴数据范围
input_set_abs_params(idev,ABS_X,MPU3050_MIN_VALUE,MPU3050_MAX_VALUE,0,0);
input_set_abs_params(idev,ABS_Y,MPU3050_MIN_VALUE,MPU3050_MAX_VALUE,0,0);
input_set_abs_params(idev,ABS_Z,MPU3050_MIN_VALUE,MPU3050_MAX_VALUE,0,0);
input_set_drvdata(idev,sensor);//&idev-》dev-》p-》driver_data=sensor
pm_runtime_set_active(&client-》dev);
error=mpu3050_hw_init(sensor);//初始化MPU3050固件
if(error)
gotoerr_pm_set_suspended;
//申请中断,上升沿触发
error=request_threaded_irq(client-》irq,NULL,mpu3050_interrupt_thread,IRQF_TRIGGER_RISING,“mpu3050”,sensor);
if(error){
dev_err(&client-》dev,“can‘tgetIRQ%d,error%d\n”,client-》irq,error);
gotoerr_pm_set_suspended;
}
error=input_register_device(idev);//注册输入设备
if(error){
dev_err(&client-》dev,“failedtoregisterinputdevice\n”);
gotoerr_free_irq;
}
pm_runtime_enable(&client-》dev);
pm_runtime_set_autosuspend_delay(&client-》dev,MPU3050_AUTO_DELAY);
return0;
err_free_irq:
free_irq(client-》irq,sensor);
err_pm_set_suspended:
pm_runtime_set_suspended(&client-》dev);
err_free_mem:
input_free_device(idev);
kfree(sensor);
returnerror;
}
申请,配置,注册相应的input设备,设置电源模式,初始化mpu3050芯片,申请中断,并指明中断返回函数
设置电源模式:mpu3050有两种电压模式val=1为正常模式,val=0为低功耗模式
staticvoidmpu3050_set_power_mode(structi2c_client*client,u8val)
{
u8value;
value=i2c_smbus_read_byte_data(client,MPU3050_PWR_MGM);//获取0x3E寄存器数据
//根据val值设置0x3E寄存器第6位SLEEP
value=(value&~MPU3050_PWR_MGM_MASK)|
(((val《《MPU3050_PWR_MGM_POS)&MPU3050_PWR_MGM_MASK)^MPU3050_PWR_MGM_MASK);
i2c_smbus_write_byte_data(client,MPU3050_PWR_MGM,value);//设置0x3E寄存器数据
}
初始化mpu3050:软复位,配置时钟及分频。。。
staticint__devinitmpu3050_hw_init(structmpu3050_sensor*sensor)
{
structi2c_client*client=sensor-》client;//获取i2c客户端
intret;
u8reg;
/*Reset设置0x3E寄存器第7位H_RESET*/
ret=i2c_smbus_write_byte_data(client,MPU3050_PWR_MGM,MPU3050_PWR_MGM_RESET);
if(ret《0)
returnret;
//获取0x3E寄存器值
ret=i2c_smbus_read_byte_data(client,MPU3050_PWR_MGM);
if(ret《0)
returnret;
ret&=~MPU3050_PWR_MGM_CLKSEL;//清除0x3E寄存器0~2位CLK_SET值
ret|=MPU3050_PWR_MGM_PLL_Z;//设置0x3E寄存器CLK_SET值为0x03
ret=i2c_smbus_write_byte_data(client,MPU3050_PWR_MGM,ret);//设置0x3E寄存器
if(ret《0)
returnret;
/*Outputfrequencydivider.Thepollinterval设置0x15寄存器值为119输出分频值*/
ret=i2c_smbus_write_byte_data(client,MPU3050_SMPLRT_DIV,MPU3050_DEFAULT_POLL_INTERVAL-1);
if(ret《0)
returnret;
/*Setlowpassfilterandfullscale设置低通滤波器和全扫描范围*/
reg=MPU3050_DEFAULT_FS_RANGE;
reg|=MPU3050_DLPF_CFG_42HZ《《3;
reg|=MPU3050_EXT_SYNC_NONE《《5;
ret=i2c_smbus_write_byte_data(client,MPU3050_DLPF_FS_SYNC,reg);//设置0x16寄存器
if(ret《0)
returnret;
return0;
}
中断返回函数:读取xyz轴数值,并上报给input子系统
staticirqreturn_tmpu3050_interrupt_thread(intirq,void*data)
{
structmpu3050_sensor*sensor=data;//获取mpu3050传感器
structaxis_dataaxis;
mpu3050_read_xyz(sensor-》client,&axis);//获取xyz轴数值
input_report_abs(sensor-》idev,ABS_X,axis.x);//上报x轴事件
input_report_abs(sensor-》idev,ABS_Y,axis.y);//上报y轴事件
input_report_abs(sensor-》idev,ABS_Z,axis.z);//上报z轴事件
input_sync(sensor-》idev);//同步事件
returnIRQ_HANDLED;
}
获取xyz轴数值,通过i2c命令去获取便可
staticintmpu3050_xyz_read_reg(structi2c_client*client,u8*buffer,intlength)
{
/*
*Annoyingwecan’tmakethisconstbecausethei2clayerdoesn‘t
*declareinputbuffersconst.
*/
charcmd=MPU3050_XOUT_H;//i2c读取0x1D~0x22寄存器值
structi2c_msgmsg[]={
{
.addr=client-》addr,
.flags=0,
.len=1,
.buf=&cmd,
},
{
.addr=client-》addr,
.flags=I2C_M_RD,
.len=length,
.buf=buffer,
},
};
returni2c_transfer(client-》adapter,msg,2);
}
应用层在MPU3050设备节点的时候会开启中断,MPU3050有数据更新则会触发中断,接着调用中断返回函数上报事件,应用程序便可读取设备节点获取xyz轴的数据
staticintmpu3050_input_open(structinput_dev*input)
{
structmpu3050_sensor*sensor=input_get_drvdata(input);//获取mpu3050传感器
interror;
pm_runtime_get(sensor-》dev);
/*Enableinterrupts
使能中断,设置0x17寄存器MPU_RDY_EN,DMP_DONE_EN,RAW_RDY_EN位*/
error=i2c_smbus_write_byte_data(sensor-》client,MPU3050_INT_CFG,
MPU3050_LATCH_INT_EN|MPU3050_RAW_RDY_EN|MPU3050_MPU_RDY_EN);
if(error《0){
pm_runtime_put(sensor-》dev);
returnerror;
}
return0;
}
-
关于陀螺仪与加速度传感器2014-03-13 0
-
三轴陀螺仪2014-07-03 0
-
三陀螺仪mpu6050测试程序(内部整理)2014-08-07 0
-
三轴陀螺仪-MPU-6050模块/GY-521-3205模块资料和测试程序2015-08-11 0
-
MPU-6050三轴加速度 陀螺仪模块资料2016-06-03 0
-
三轴陀螺仪和六轴陀螺仪的区别2018-11-08 0
-
三轴陀螺仪和六轴的区别2021-08-06 0
-
STM32F407ZE驱动陀螺仪MPU6050有何应用2021-11-15 0
-
什么是陀螺仪2022-02-10 0
-
陀螺仪MPU6050的相关资料推荐2022-02-10 0
-
使用mpu陀螺仪的一些心得分享2022-02-10 0
-
基于战舰V3的MPU6050六轴陀螺仪实验的相关资料分享2022-02-10 0
-
MPU-6050模块三轴加速度+三轴陀螺仪简介2022-02-10 0
-
mpu6050和mpu3050有什么不同和相同(基础介绍和区别分析)2017-12-11 35129
全部0条评论

快来发表一下你的评论吧 !
