
资料下载


一种无人机三维航路自适应跟踪控制
分享资料个
近年来,无人机在环境监测、地图测绘、灾难救援、边境巡逻、态势感知、毁伤评估、通信中继等民用和军用领域得到了广泛应用。在多种任务想定中,无人机都需要具有规划参考航迹并精确跟踪该参考航迹的能力。在城区监控和野外搜救等任务中,无人机需要在城市建筑之间或各种地形表面贴近飞行。这种情况下,无人机必须具备精确跟踪参考航迹能力。与有人机依赖飞行员控制飞机按照参考航迹飞行不同,无人机依赖自动控制技术实现该功能。作为无人机自动控制关键技术之一,航迹跟踪控制技术能够保证无人机跟踪以时间为参数的参考航迹。航迹跟踪控制技术也应用于无人机编队控制、自动空中加油和追踪动态目标等动态任务中。航迹跟踪控制的基本要求是精确性。而对于无人机来说,其被控过程机理复杂,具有高度非线性、时变性和不确定性,又由于负载等内外部扰动因素的影响,精确的无人机航迹跟踪控制是一个较大的挑战。
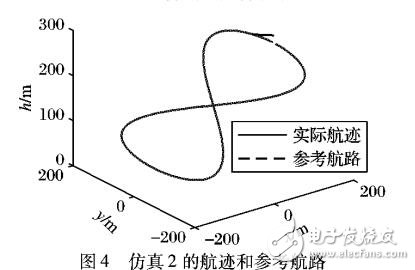
针对无人机自动驾驶仪参数标称值偏离实际值情况下的航迹跟踪问题,提出一种无人机三维航路自适应跟踪导引律。首先在无人机自动驾驶仪参数无偏离的条件下,推导出能够跟踪三维航路的速度指令、航迹倾斜角指令和航迹方位角指令,并使用Lyapunov穗定性理论证明了跟踪系统全局渐进稳定;之后考虑自动驾驶仪参数标称值偏离实际值的情况,设计自适应算法在线估计自动驾驶仪参数,得到无人机三维航路自适应跟踪导引律。仿真实验表明所提出的自适应跟踪导引律能够使无人机在自动驾驶仪参数偏离条件下有效跟踪三维航迹。

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





