
资料下载


×
前缀投影技术的大规模轨迹预测模型
消耗积分:2 |
格式:rar |
大小:1.39 MB |
2017-12-25
分享资料个
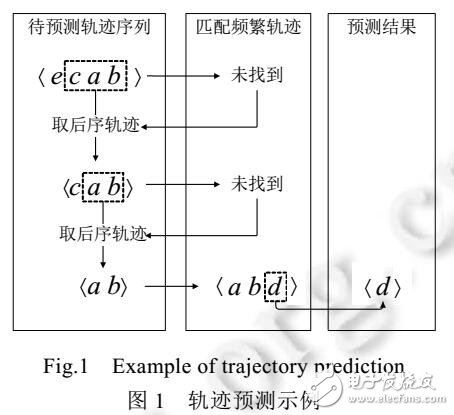
智能手机、车载GPS终端、可穿戴设备产生了海量的轨迹数据。这些数据不仅描述了移动对象的历史轨迹。而且精确地反映出移动对象的运动特点.已有轨迹预测方法的不足在于:不能同时兼具预测的准确性和时效性。有效的轨迹预测受限于路网等局部空间范围。无法处理复杂、大规模位置数据.为了解决上述问题。针对海量移动对象轨迹数据,结合频繁序列模式发现的思想,提出了基于前缀投影技术的轨迹预测模型PPTP(prefix projection based trajectory prediction modeD,包含两个关键步骤:(1)挖掘频繁轨迹模式,构造投影数据库并递归挖掘频繁前序轨迹模式;(2)轨迹匹配。以不同频繁序列模式作为前缀增量式扩展生成频繁后序轨迹,将大于最小支持度阈值的最长连续轨迹作为结果输出,算法的优势在于:可以通过较短的频繁序列模式。增量式生成长轨迹模式:不会产生无用的候选轨迹。弥补频繁模式挖掘计算代价较高的不足彳4用真实大规模轨迹数据进行多角度实验。表明PPTP轨迹预测算法具有较高的预测准确性,相对于1阶马尔可夫链预测算法,其平均预测准确率可以提升3 9.8%.基于所提出的轨迹预测模型。开发了一个通用的轨迹预测系统。能够可视化输出完整的轨迹路线。为用户路径规划提供辅助决策支持.

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(1)
发评论
-
 康宁辉
2020-08-20
0 回复 举报超强的光影计算运动轨迹理论,支持 收起回复
康宁辉
2020-08-20
0 回复 举报超强的光影计算运动轨迹理论,支持 收起回复
- 相关下载
- 相关文章





