

普通车和自动驾驶车发生碰撞的原因分析
描述
“自动驾驶说”旨在分享原创的行业分析和学习心得,每周一篇。本人在硅谷某自动驾驶公司担任产品经理,专注于自动驾驶安全研究、产品战略以及设计。文章仅代表个人观点。欢迎留言,互相学习。
自从2014年Delphi上路测试发生事故,直至今天,美国加州车辆管理局(DMV)已经在网上公布了51起涉及自动驾驶车的事故。今天就和大家一起来分析这51起事故。看看普通车为什么会和自动驾驶车发生碰撞,以及自动驾驶测试过程中各个公司遇到的挑战。所有数据都来自从DMV网站上下载的报告。

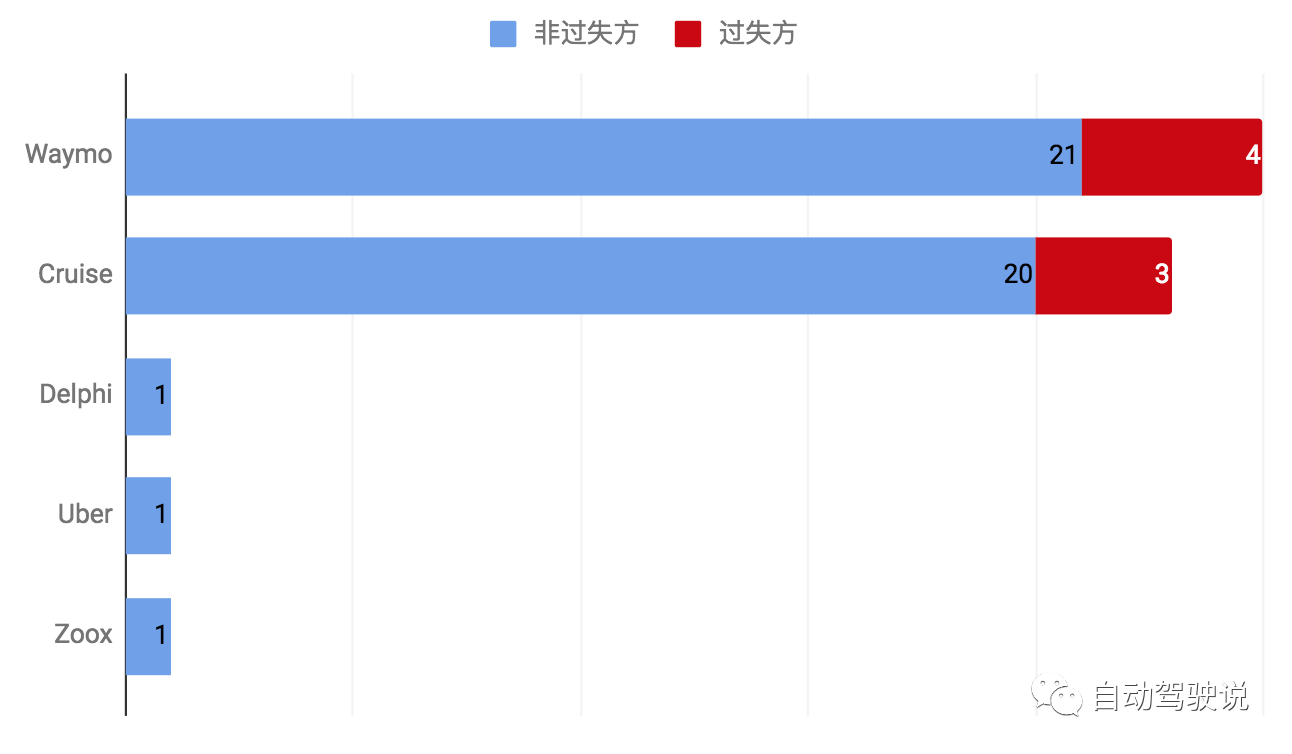
在51起事故中,谷歌Waymo有25起,其中4起过失方在Waymo。通用Cruise共有23起事故,其中3起过失方在Cruise。考虑到这两家公司的测试里程很多,测试时间也很久,事故比其他公司多也是理所当然。综合来看,只有14%的事故是自动驾驶车的责任,其他大部分情况都是普通车的责任。
测试车的行驶状态
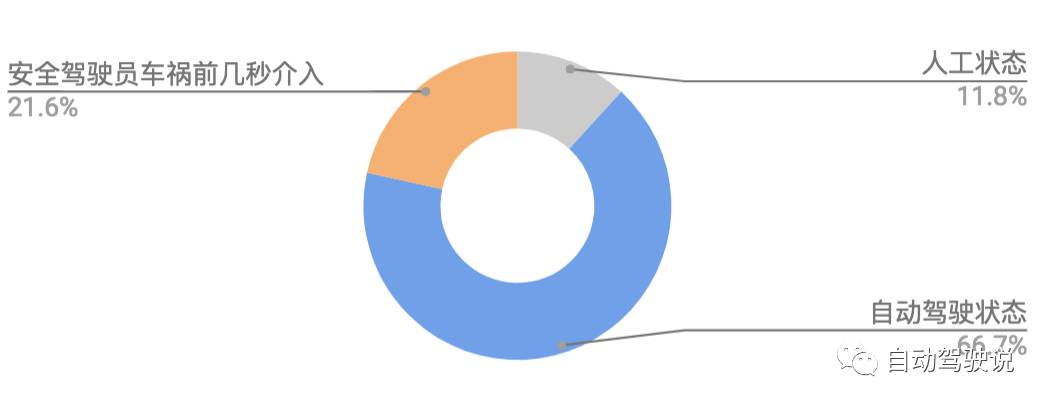
88%的事故中(45起),测试车处于自动驾驶状态。其中11起事故发生前几秒钟,安全驾驶员成功介入。在7起责任方在自动驾驶车的事故中,安全驾驶员都有介入。(大家可能会问,怎样从外面看出来一辆测试车是否在自动驾驶状态。自动驾驶车的行驶状态其实从外面看是很难判断出来的。在加州,政府规定安全驾驶员必须时刻都双手悬放在方向盘上,随时准备介入。)
涉及车辆类型
在这51起自动驾驶事故中,有1起事故涉及卡车,1起涉及公交车,1起涉及助力车,3起涉及自行车。其他事故都是普通车。其中,本田有10起,福特有6起。
事故原因
Top 1.追尾
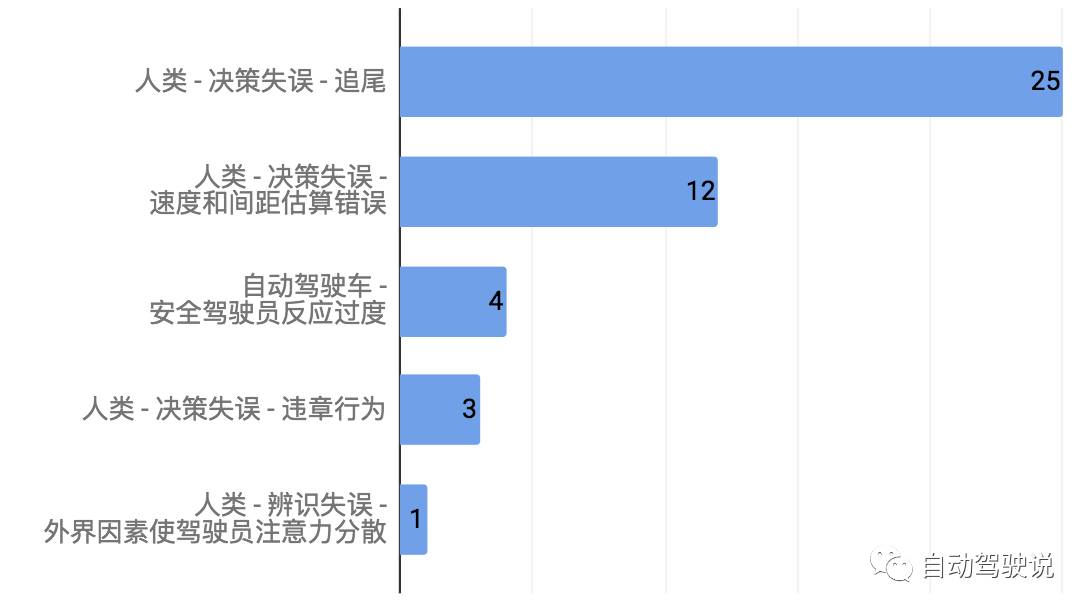
在45起自动驾驶状态事故中,追尾的情况最多,有25起。尤其是Waymo,相同场景下被追尾14次,都是在路口红灯时候右转时候被追尾。以下是其中一篇报告原文。自动驾驶车的行为毕竟和人类驾驶不同,人类司机容易误判自动驾驶的行为,导致追尾。

Top 2. 间距估算失误
12起事故是因为自动驾驶车旁侧的车加塞,蹭到了自动驾驶车侧面的雷达。自动驾驶车一般都会在侧面安装雷达,这就会导致车体过宽。当然,真正面向市场的自动驾驶车会将雷达安装在车体内部,事故中的都只是测试车。

Top 3. 安全驾驶员反应过度
其中4起事故是因为自动驾驶车的安全驾驶员反应过度。这4起事故很有意思,我们不妨拿出其中的一起来看看。

事故大致过程:一辆尼桑突然加塞到Waymo前面,Waymo的安全驾驶员马上介入,终止了自动驾驶状态,向右变道,想躲开这辆尼桑。右边车道的车速度比Waymo快很多,就撞上了Waymo右后侧。可见,人类做出的决策还是容易导致车祸,而自动驾驶状态下反而不会导致车祸。
事故造成损失
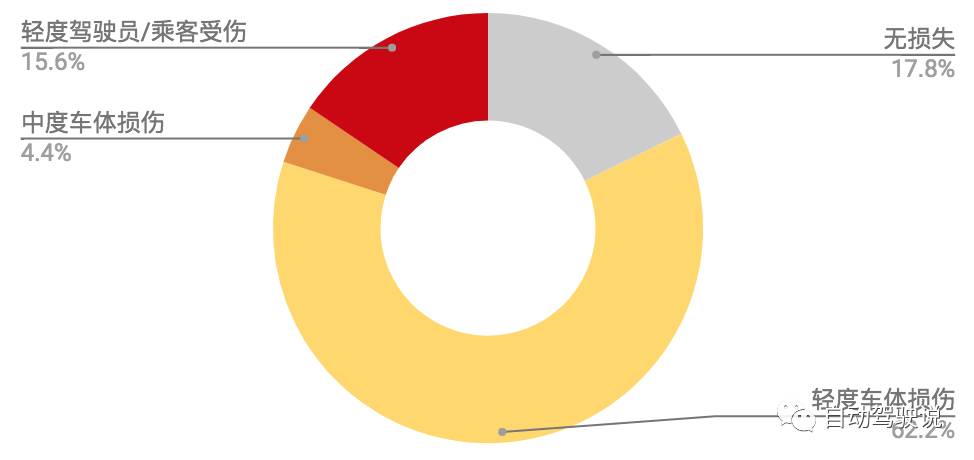
62%的事故都只造成了车体轻微擦伤,其中大部分都是蹭到了雷达或是追尾造成的车尾碰撞。
这51起事故显然不能代表所有可能发生的事故,但至少可以给我们提供很多真实的例子,各个公司需要更好的培训安全驾驶员、设计车型、并对人类司机行为作出更精准的预判。
- 相关推荐
- 自动驾驶
-
【mBot申请】自动驾驶车2015-11-30 0
-
【话题】特斯拉首起自动驾驶致命车祸,自动驾驶的冬天来了?2016-07-05 0
-
自动驾驶真的会来吗?2016-07-21 0
-
细说关于自动驾驶那些事儿2017-05-15 0
-
自动驾驶的到来2017-06-08 0
-
车联网对自动驾驶的影响2019-03-19 0
-
如何让自动驾驶更加安全?2019-05-13 0
-
自动驾驶汽车中传感器的分析2020-05-14 0
-
自动驾驶车的人车交互接口设计方案2020-07-30 0
-
UWB定位可以用在自动驾驶吗2020-11-18 0
-
PLC在普通车床C650控制中的应用2009-04-10 688
-
C620-1型普通车床控制线路2008-12-04 3892
-
普通车床的结构图2009-03-18 77817
-
C6S0普通车床继电接触器控制电路2010-02-27 1669
-
自动驾驶车会比普通车舒适的原因分析2018-07-16 3783
全部0条评论

快来发表一下你的评论吧 !
