

spi从机程序设计_spi从机程序代码详细介绍
嵌入式设计应用
描述
SPI(serial peripheral interface)串行外围设备接口。是一种全双工同步通信总线。本文为大家介绍两种spi从机程序。
STM32F407的SPI主从机通信程序
#include “spi.h”
u8 SPI_Data[3];
void SPI1_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
SPI_InitTypeDef SPI_InitStructure;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOB, ENABLE);//使能GPIOB时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_SPI1, ENABLE);//使能SPI1时钟
//GPIOFB3,4,5初始化设置
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3|GPIO_Pin_4|GPIO_Pin_5;//PB3~5复用功能输出
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;//复用功能
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;//推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;//100MHz
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_DOWN;//上拉
GPIO_Init(GPIOB, &GPIO_InitStructure);//初始化
GPIO_PinAFConfig(GPIOB,GPIO_PinSource3,GPIO_AF_SPI1); //PB3复用为 SPI1
GPIO_PinAFConfig(GPIOB,GPIO_PinSource4,GPIO_AF_SPI1); //PB4复用为 SPI1
GPIO_PinAFConfig(GPIOB,GPIO_PinSource5,GPIO_AF_SPI1); //PB5复用为 SPI1
//这里只针对SPI口初始化
RCC_APB2PeriphResetCmd(RCC_APB2Periph_SPI1,ENABLE);//复位SPI1
RCC_APB2PeriphResetCmd(RCC_APB2Periph_SPI1,DISABLE);//停止复位SPI1
SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex; //设置SPI单向或者双向的数据模式:SPI设置为双线双向全双工
SPI_InitStructure.SPI_Mode = SPI_Mode_Master; //设置SPI工作模式:设置为主SPI
SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b; //设置SPI的数据大小:SPI发送接收8位帧结构
SPI_InitStructure.SPI_CPOL = SPI_CPOL_Low; //串行同步时钟的空闲状态为高电平
SPI_InitStructure.SPI_CPHA = SPI_CPHA_1Edge; //串行同步时钟的第二个跳变沿(上升或下降)数据被采样
SPI_InitStructure.SPI_NSS = SPI_NSS_Soft; //NSS信号由硬件(NSS管脚)还是软件(使用SSI位)管理:内部NSS信号有SSI位控制
SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_4; //定义波特率预分频的值:波特率预分频值为256
SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB; //指定数据传输从MSB位还是LSB位开始:数据传输从MSB位开始
SPI_InitStructure.SPI_CRCPolynomial = 7; //CRC值计算的多项式
SPI_Init(SPI1, &SPI_InitStructure); //根据SPI_InitStruct中指定的参数初始化外设SPIx寄存器
SPI_Cmd(SPI1, ENABLE); //使能SPI外设
//SPI1_ReadWriteByte(0xff);//启动传输
}
//SPI1速度设置函数
//SPI速度=fAPB2/分频系数
//@ref SPI_BaudRate_Prescaler:SPI_BaudRatePrescaler_2~SPI_BaudRatePrescaler_256
//fAPB2时钟一般为84Mhz:
void SPI1_SetSpeed(u8 SPI_BaudRatePrescaler)
{
assert_param(IS_SPI_BAUDRATE_PRESCALER(SPI_BaudRatePrescaler));//判断有效性
SPI1-》CR1&=0XFFC7;//位3-5清零,用来设置波特率
SPI1-》CR1|=SPI_BaudRatePrescaler; //设置SPI1速度
SPI_Cmd(SPI1,ENABLE); //使能SPI1
}
//SPI1 读写一个字节
//TxData:要写入的字节
//返回值:读取到的字节
void SPI1_WriteByte(u8 TxData)
{
while (SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_TXE) == RESET){}//等待发送区空
SPI_I2S_SendData(SPI1, TxData); //通过外设SPIx发送一个byte 数据
//while (SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_RXNE) == RESET){} //等待接收完一个byte
//return SPI_I2S_ReceiveData(SPI1); //返回通过SPIx最近接收的数据
}
void SPI2_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
SPI_InitTypeDef SPI_InitStructure;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOB, ENABLE);//使能GPIOA时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_SPI2, ENABLE); //使能SPI1时钟
//GPIOFB3,4,5初始化设置
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13|GPIO_Pin_14|GPIO_Pin_15;//PB3~5复用功能输出
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;//复用功能
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;//推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;//100MHz
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_DOWN;//上拉
GPIO_Init(GPIOB, &GPIO_InitStructure);//初始化
GPIO_PinAFConfig(GPIOB,GPIO_PinSource13,GPIO_AF_SPI2); //PB13复用为 SPI2
GPIO_PinAFConfig(GPIOB,GPIO_PinSource14,GPIO_AF_SPI2); //PB14复用为 SPI2
GPIO_PinAFConfig(GPIOB,GPIO_PinSource15,GPIO_AF_SPI2); //PB15复用为 SPI2
//这里只针对SPI口初始化
RCC_APB2PeriphResetCmd(RCC_APB1Periph_SPI2,ENABLE);//复位SPI1
RCC_APB2PeriphResetCmd(RCC_APB1Periph_SPI2,DISABLE);//停止复位SPI1
SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex; //设置SPI单向或者双向的数据模式:SPI设置为双线双向全双工
SPI_InitStructure.SPI_Mode = SPI_Mode_Slave; //设置SPI工作模式:设置为主SPI
SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b; //设置SPI的数据大小:SPI发送接收8位帧结构
SPI_InitStructure.SPI_CPOL = SPI_CPOL_Low; //串行同步时钟的空闲状态为高电平
SPI_InitStructure.SPI_CPHA = SPI_CPHA_1Edge; //串行同步时钟的第二个跳变沿(上升或下降)数据被采样
SPI_InitStructure.SPI_NSS = SPI_NSS_Soft; //NSS信号由硬件(NSS管脚)还是软件(使用SSI位)管理:内部NSS信号有SSI位控制
SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_2; //定义波特率预分频的值:波特率预分频值为256
SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB; //指定数据传输从MSB位还是LSB位开始:数据传输从MSB位开始
SPI_InitStructure.SPI_CRCPolynomial = 7; //CRC值计算的多项式
SPI_Init(SPI2, &SPI_InitStructure); //根据SPI_InitStruct中指定的参数初始化外设SPIx寄存器
SPI_Cmd(SPI2, ENABLE); //使能SPI外设
}
//SPI1速度设置函数
//SPI速度=fAPB2/分频系数
//@ref SPI_BaudRate_Prescaler:SPI_BaudRatePrescaler_2~SPI_BaudRatePrescaler_256
//fAPB2时钟一般为84Mhz:
void SPI2_SetSpeed(u8 SPI_BaudRatePrescaler)
{
assert_param(IS_SPI_BAUDRATE_PRESCALER(SPI_BaudRatePrescaler));//判断有效性
SPI2-》CR1&=0XFFC7;//位3-5清零,用来设置波特率
SPI2-》CR1|=SPI_BaudRatePrescaler; //设置SPI2速度
SPI_Cmd(SPI2,ENABLE); //使能SPI1
}
//SPI2 读写一个字节
//TxData:要写入的字节
//返回值:读取到的字节
u8 SPI2_ReadByte()
{
//while (SPI_I2S_GetFlagStatus(SPI2, SPI_I2S_FLAG_TXE) == RESET){}//等待发送区空
//SPI_I2S_SendData(SPI2, TxData); //通过外设SPIx发送一个byte 数据
while (SPI_I2S_GetFlagStatus(SPI2, SPI_I2S_FLAG_RXNE) == RESET){} //等待接收完一个byte
return SPI_I2S_ReceiveData(SPI2); //返回通过SPIx最近接收的数据
}
void SPI2_WriteByte(u8 TxData)
{
SPI_I2S_SendData(SPI2, TxData); //通过外设SPIx发送一个byte 数据
while (SPI_I2S_GetFlagStatus(SPI2, SPI_I2S_FLAG_TXE) == RESET){}//等待发送区空
}
//外部中断3服务程序
void EXTI3_IRQHandler(void)
{
Flage=Flage|0x02;
CS2=0;
EXTI_ClearITPendingBit(EXTI_Line3); //清除LINE3上的中断标志位
}
//外部中断4服务程序
void EXTI4_IRQHandler(void)
{
Flage=Flage|0x04;
CS3=0;
EXTI_ClearITPendingBit(EXTI_Line4); //清除LINE4上的中断标志位
}
//外部中断5服务程序
//外部中断初始化程序
void EXTIX_Init()
{
NVIC_InitTypeDef NVIC_InitStructure;
EXTI_InitTypeDef EXTI_InitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_SYSCFG, ENABLE);//使能SYSCFG时钟
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOE, ENABLE); //使能GPIOE时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2|GPIO_Pin_3|GPIO_Pin_4|GPIO_Pin_5;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN;//普通输入模式
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;//100M
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_DOWN;//上拉
GPIO_Init(GPIOE, &GPIO_InitStructure);//初始化GPIOE2,3,4,5
SYSCFG_EXTILineConfig(EXTI_PortSourceGPIOE, EXTI_PinSource2);//PE2 连接到中断线2
SYSCFG_EXTILineConfig(EXTI_PortSourceGPIOE, EXTI_PinSource3);//PE3 连接到中断线3
SYSCFG_EXTILineConfig(EXTI_PortSourceGPIOE, EXTI_PinSource4);//PE4 连接到中断线4
SYSCFG_EXTILineConfig(EXTI_PortSourceGPIOE, EXTI_PinSource5);//PE5 连接到中断线5
/* 配置EXTI_Line2,3,4 */
EXTI_InitStructure.EXTI_Line = EXTI_Line2 | EXTI_Line3 | EXTI_Line4 | EXTI_Line5;
EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;//中断事件
EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Rising; //下降沿触发
EXTI_InitStructure.EXTI_LineCmd = ENABLE;//中断线使能
EXTI_Init(&EXTI_InitStructure);//配置
NVIC_InitStructure.NVIC_IRQChannel = EXTI2_IRQn;//外部中断2
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0x03;//抢占优先级3
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0x02;//子优先级2
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;//使能外部中断通道
NVIC_Init(&NVIC_InitStructure);//配置
NVIC_InitStructure.NVIC_IRQChannel = EXTI3_IRQn;//外部中断3
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0x02;//抢占优先级2
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0x02;//子优先级2
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;//使能外部中断通道
NVIC_Init(&NVIC_InitStructure);//配置
NVIC_InitStructure.NVIC_IRQChannel = EXTI4_IRQn;//外部中断4
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0x01;//抢占优先级1
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0x02;//子优先级2
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;//使能外部中断通道
NVIC_Init(&NVIC_InitStructure);//配置
NVIC_InitStructure.NVIC_IRQChannel = EXTI9_5_IRQn;//外部中断4
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0x01;//抢占优先级1
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0x02;//子优先级2
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;//使能外部中断通道
NVIC_Init(&NVIC_InitStructure);//配置
}
int main(void)
{
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//设置系统中断优先级分组2
delay_init(100); //初始化延时函数
LED_Init(); //初始化LED
CS_Init();
SPI1_Init();
SPI2_Init();
EXTIX_Init();
while(1)
{
CS2=1;
if(Flage&0x02)
{
Flage=Flage&0xfd;
CS3=1;
}
if(Flage&0x04)
{
Flage=Flage&0xfb;
SPI1_WriteByte(0xaa);
SPI_Data[0]=SPI2_ReadByte();
SPI1_WriteByte(0xc3);
SPI_Data[1]=SPI2_ReadByte();
SPI1_WriteByte(0x55);
SPI_Data[2]=SPI2_ReadByte();
if((SPI_Data[0]==0xaa)&&(SPI_Data[1]==0xc3)&&(SPI_Data[2]==0x55))
{
BEEP=~BEEP;
LED0=~LED0;
LED1=~LED1;
delay_ms(500);
}
memset(SPI_Data,0,3);
}
}
}
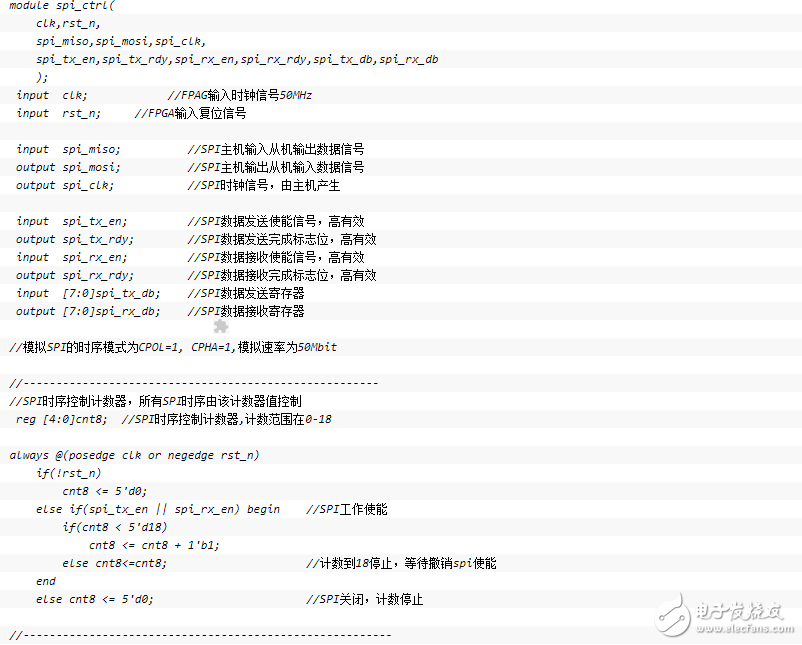
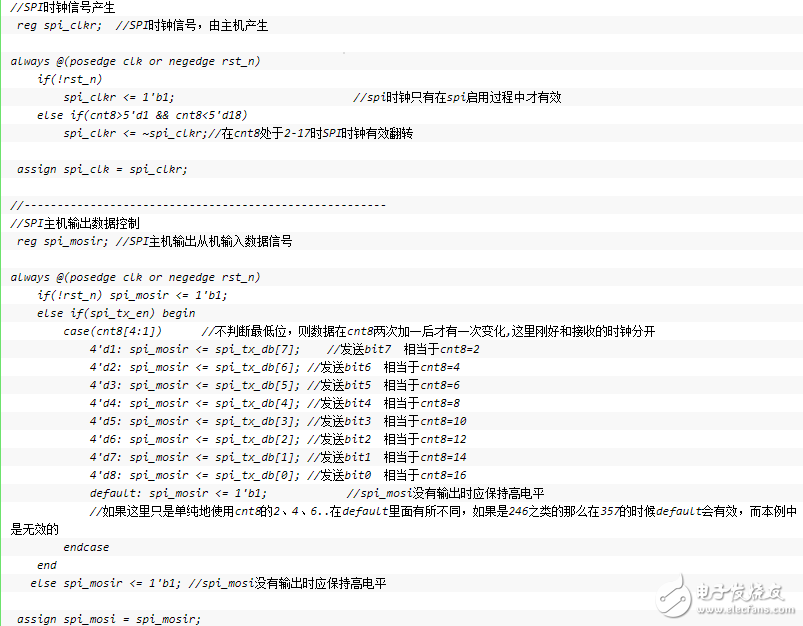
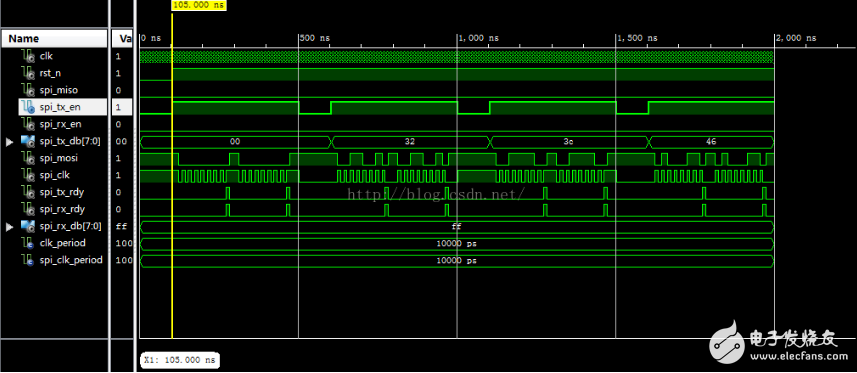
基于计数器的spi从机程序设计
SPI 即为:serial peripheral interface,串行外围设备接口。是一种全双工同步通信总线。通信是通过数据传输来完成的,SPI是串行通信协议,也就是说,数据时一位一位传输的。也就是时钟线存在的原因,由于时钟线提供的时钟脉冲,数据发送和数据接收都是基于这个时钟脉冲完成数据传输的,数据通过数据输出线输出,数据在时钟上升沿或者下降沿时改变,在紧接着的下降沿或者上升沿被读取,完成一次数据传输,输入原理和输出一样。也就是说数据输入和输出是在同一个时钟完成的,而区别就是在时钟的上升沿输入那么在时钟下降沿就输出,或者相反。为了实现这一点,一下设计就是通过一个计数器,在计数器数到偶数的时候则输出,计数器数到奇数的时候则输入。代码如下:

-
 fang百川
2018-08-13
0 回复 举报后面的程序呢 收起回复
fang百川
2018-08-13
0 回复 举报后面的程序呢 收起回复
-
FPGA实现SPI接口(包括主机和从机程序)2012-08-11 0
-
怎样从SPI FLASH加载FPGA程序2016-04-29 0
-
DSP 28335 SPI从机程序2017-12-04 0
-
STM32 spi从机代码分享2018-07-02 0
-
ATmega32为主机Attiny2313作为SPI从机的驱动程序2018-07-05 0
-
STM32 spi从机代码2018-07-06 0
-
PIC18F4550作为SPI从器件2020-03-12 0
-
SPI从代码dsPIC33E2020-04-10 0
-
SPI1和SPI3配置nrf24l01的程序代码该如何去实现2021-12-16 0
-
请问CH573 SPI从机是否有相关从机DMA的代码?2022-08-12 0
-
SPI—CH32V307VCT6实现SPI从机DMA收发2023-03-08 0
-
KL25_MQXlite_SPI_KDS程序源代码2015-12-07 696
-
蚁群算法matlab程序代码2018-02-02 37536
-
USB接口编程盒SPI I2C接口评估程序设计和烧录软件免费下载2019-05-06 1014
-
图论算法及MATLAB程序代码的详细资料说明2020-04-23 809
全部0条评论

快来发表一下你的评论吧 !
