

陀螺仪在火箭上怎么运用?原来它的原理是这么神奇
描述
陀螺仪在很多地方都可以看得到。手机、工控装备等,随着物联网技术的发展,它的应用只会越来越多。陀螺仪是用高速回转体的动量矩敏感壳体相对惯性空间绕正交于自转轴的一个或二个轴的角运动检测装置。利用其他原理制成的角运动检测装置起同样功能的也称陀螺仪。
陀螺仪应用广泛
现代陀螺仪是一种能够精确地确定运动物体的方位的仪器,它是现代航空,航海,航天和国防工业中广泛使用的一种惯性导航仪器,它的发展对一个国家的工业,国防和其它高科技的发展具有十分重要的战略意义。传统的惯性陀螺仪主要是指机械式的陀螺仪,机械式的陀螺仪对工艺结构的要求很高,结构复杂,它的精度受到了很多方面的制约。自从上个世纪七十年代以来,现代陀螺仪的发展已经进入了一个全新的阶段。
1976年 等提出了现代光纤陀螺仪的基本设想,到八十年代以后,现代光纤陀螺仪就得到了非常迅速的发展,与此同时激光谐振陀螺仪也有了很大的发展。光纤陀螺仪具有结构紧凑,灵敏度高,工作可靠等等优点,关键部件和光纤陀螺仪同时发展的除了环式激光陀螺仪外,还有现代集成式的振动陀螺仪,集成式的振动陀螺仪具有更高的集成度,体积更小,也是现代陀螺仪的一个重要的发展方向。
现代光纤陀螺仪包括干涉式陀螺仪和谐振式陀螺仪两种,它们都是根据塞格尼克的理论发展起来的。塞格尼克理论的要点是这样的:当光束在一个环形的通道中前进时,如果环形通道本身具有一个转动速度,那么光线沿着通道转动的方向前进所需要的时间要比沿着这个通道转动相反的方向前进所需要的时间要多。也就是说当光学环路转动时,在不同的前进方向上,光学环路的光程相对于环路在静止时的光程都会产生变化。利用这种光程的变化,如果使不同方向上前进的光之间产生干涉来测量环路的转动速度,就可以制造出干涉式光纤陀螺仪,如果利用这种环路光程的变化来实现在环路中不断循环的光之间的干涉,也就是通过调整光纤环路的光的谐振频率进而测量环路的转动速度,就可以制造出谐振式的光纤陀螺仪。从这个简单的介绍可以看出,干涉式陀螺仪在实现干涉时的光程差小,所以它所要求的光源可以有较大的频谱宽度,而谐振式的陀螺仪在实现干涉时,它的光程差较大,所以它所要求的光源必须有很好的单色性。
日本某公司和宇宙航空研究开发机构共同开发了用于国产火箭的高精度MEMS陀螺仪。该陀螺仪是用于监测火箭及卫星等航空、航天器航行位置的重要设备,新型MEMS陀螺仪精度比原有陀螺仪提高了一个数量级,达到了0.1°∕h。
在传感器行业快速发展的今天,芬兰VTI作为全球领先的加速度传感器,陀螺仪生产商为传感器发展提供了良好的发展机遇,芬兰VTI公司成功研发并生 产了基于先进的3DMEMS技术的陀螺仪(角速率传感器)。基于VTI公司20年MEMS的成功经验,VTI的 MEMS陀螺仪产品,具有温度漂移小,性能稳定,性价比高以及抗冲击力强等特点。目前,陀螺仪已广泛应用于智能手机和数码相机等民用电子产品。在航空、航 天器上则至少需要安装一个陀螺仪,使用激光作为光源的光学式陀螺仪是现行的主流设备。但光学陀螺仪存在结构复杂、技术要求高、耗电量大、成本高等缺陷,而 MEMS陀螺仪由于精度较低,不满足航空、航天器的需要。
日本对该公司精度最高的MEMS陀螺仪进行了改良,将温度特性校正方式由模拟改为数字以提高校正精度,并改善了传感头的材料和结构。通过改进,陀螺 仪的组成部件减少了一半,同时减轻了重量。之前在H2A火箭上搭载的光学式陀螺仪由玻璃和激光器件构成,新型MEMS陀螺仪在精度不变的情况下,价格是光 学式陀螺仪的百分之一(约为几十万日元)。
陀螺仪的两个最基本的特性就是它的定轴性和进动性。凡是绕自身对称轴高速旋转的物体都可以称为陀螺,陀螺具有特殊的转动规律。图1是一个玩具陀螺。如何让它在光滑的桌面上直立起来呢?其实,只要使它绕垂直轴(重力方向)快速旋转就行了。这时如果桌面倾斜,就会发现陀螺转轴方向仍保持不变,如图1所示,这就是陀螺的定轴性。如果转轴的初始方向不是严格垂直,而是偏离重力方向一个角度,我们又发现陀螺转轴会在一个以重力方向为轴线的圆锥面上运动,图1,而不是像不转动的刚体那样在重力作用下倒下,这就是陀螺的进动性。陀螺的定轴性和进动性统称为陀螺效应。
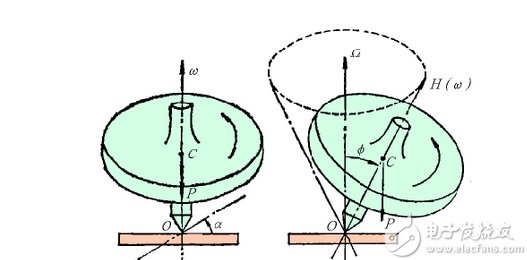
图1 玩具陀螺的运动
利用陀螺的定轴性和进动性,用不同的结构,配以不同的电路,就会得到不同功能的陀螺仪,如速率陀螺仪(用作测量角速度)、积分陀螺仪(用作测量角度)、陀螺加速度计(用作测量加速度)等。
惯性制导系统中最核心的部件就是陀螺仪。可以说,陀螺仪是惯性制导系统的心脏。
高速旋转的陀螺轴承安装在框架环上时,由于自转轴具有定轴性,因而使自转轴与基座的运动无关,即基座运动而自转轴不动。这样基座与自转轴之间(通过框架轴的转动)在一个方向上构成一个自由度,这种装置称为单自由度陀螺仪,图2(a)。如果在框架环外面再套一层框架环(前者称为内环,后者称为外环),且轴互相垂直,则构成一个二自由度的陀螺仪。
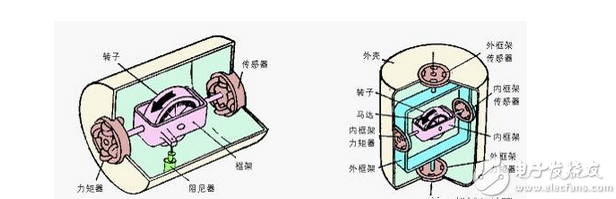
图2 单自由度陀螺仪和双自由度陀螺仪
对单自由度陀螺,当基座因某种干扰随箭体出现偏离预定姿态,产生俯仰、偏航或滚转的某一方向的运动时,因该方向陀螺自转轴保持方向不变,将使机座相对于框架环旋转一定的角度。如果用传感器把这个角度换成电信号,通过箭上该方向的伺服电子线路,驱动摇摆发动机或游动发动机(即执行机构)摆动,产生一个力矩,使箭体恢复到受干扰前的状态,这就保持了飞行中火箭姿态在该方向的稳定。
-
陀螺仪ENC-03MB2015-01-23 0
-
光纤陀螺仪的接线问题2017-05-06 0
-
如何检测陀螺仪是否坏了2018-11-07 0
-
陀螺仪的特性图解及应用2018-11-08 0
-
几种高精度陀螺仪的应用和分析2018-11-09 0
-
陀螺仪在电动独轮车上的原理及应用2018-11-09 0
-
手持陀螺仪传感器原理2018-12-05 0
-
陀螺仪的工作原理科普2019-07-25 0
-
3DM-GX3-25陀螺仪及惯性测量系统2020-06-23 0
-
陀螺仪的作用2020-09-03 0
-
陀螺仪的应用2020-09-04 0
-
常见的七大陀螺仪2020-09-06 0
-
陀螺仪的工作原理及创新应用2020-09-09 0
-
陀螺仪的基本组成及工作原理2020-12-17 0
-
关于陀螺仪的应用问题2021-08-11 0
全部0条评论

快来发表一下你的评论吧 !
