

基于ARM7 LPC21xx开发存储测试系统的方法介绍[图]
嵌入式操作系统
描述
存储测试技术是在特殊环境下记录运动物体参数的最有效的手段。本文介绍了基于ARM7 LPC21xx开发存储测试系统的方法。Philips公司16/32位微控制器LPC21xx是基于支持实时仿真和嵌入式跟踪的16/32 w位ARM7TDMIS CPU的微控制器,它具有掉电和空闲两种节电模式,可用电池供电并且长期工作。利用微控制器内部自带的10位A/D转换器来采样,用SPI与nRF24L01模块通信。
存储测试技术[1]方法是记录在特殊环境下运动物体参数的行之有效的方法。它是先将测试数据存入存储器,待装置回收后通过特定接口与上位机进行通信,还原数据信息。在许多消费类电子产品中,对数据采集存储系统的实时性和功耗提出了更高的要求,不仅要同时满足低功耗和微型化设计,还要实时地反映现场采集数据的变化。这样,就必须对系统的采样速率、功耗等提出更高的要求。随着半导体技术的发展,各种技术的进步使得高速度、低功耗的数据采集系统能够实现。
本文主要使用Philips公司16/32位微控制器LPC2148[23]作为核心控制元件,通过与nRF24L01[4]结合使用,实现数据的采集、存储以及发送。
1 系统原理
整个测试系统由模拟适配电路、外部晶振、微控制器、存储器模块、电源管理模块、无线收发模块以及接口电路组成,如图1所示。

图1 系统原理框图
1.1 电源模块
对电源模块的设计是实现整个系统省电的核心部分。即电源只需要在电路各个模块需要的时候给其供电,在不需要的时候断电来减小系统的无效耗电量。可以使用单电池电源供电实现多分枝电源网络管理,使得系统各个模块的电源相对独立供电。但此时要注意带电部分和不带电部分的兼容问题。
1.2 模拟适配电路
由于由传感器测量的信号十分微弱,需要经过适当的放大滤波等修正后才能够进行一系列处理。
1.3 微控制器
本测试系统选用Philips公司16/32位微控制器LPC2148作为核心控制元件。它内部自带10位A/D转换器,无需外加A/D转换器,即可以减小体积,又可以节省成本。同时它还具有掉电模式和空闲模式两种省电模式,合理设计可以减小系统功耗。
1.4 接口电路以及无线收发部分
本测试系统有两种方法与上位机进行通信,一种是通过无线收发模块nRF24L01来实现,另一种是通过特定的接口电路来实现,这样即使无线传输部分出现错误还可以保证事后回收数据。
2 系统主要部分的硬件与软件介绍
2.1 内部A/D转换器的开发
LPC2148内部有两个10位逐次逼近式模数转换器,8个引脚复用为输入脚(ADC0和ADC1),它具有掉电模式,测量范围是0 V~VREF,10位的转换时间≥2.44 μs,具有一个或者多个输入的突发转换模式,可选择由输入跳变或定时器匹配信号触发转换。它的基本时钟由VPB(VLSI外围总线)时钟提供,每个转换器包含一个可编程分频器,可将时钟调整至逐步逼近转换所需的4.5 MHz(最大),完全满足精度要求的转换需要11个这样的时钟。本文用LPC2148的I/O端口来实现,使用ADC模块的通道3 进行电压的测量,定义I/O端口P0.30为AD0.3,通过定时器中断的到来而对电压进行采样,对ADC寄存器的设置如下:
AD0CR=(13)| //SEL=8,选择通道3
((Fpclk/10000001)8)| //CLKDIV= Fpclk/10000001,转换时钟为 1 MHz
(016)| //BURST=0,软件控制转换操作
(017)| //CLKS=0,使用11clock转换
(121)| //PDN=1,正常工作模式
(022)| //TEST1:0=00,正常工作模式
(124)| //START=1,直接启动A/D转换
(027)| //直接启动A/D转换时此位无效
DelayNS(10);
ADC_Data=AD0DR;//读取A/D转换结果,并清除DONE标志位
while(1){
AD0CR|=124; //进行第一次转换
while((AD0STAT0x80000000)==0);//等待转换结束
AD0CR|=124;//再次启动转换
while((AD0STAT0x80000000)==0);//等待转换结束
ADC_Data=AD0DR;//读取A/D转换结果
}
2.2 SPI与nRF24L01模块的通信
SPI是一个全双工的串行接口。它设计成可以处理在一个给定总线上多个互联的主机和从机。在给定的数据传输过程中,接口上只能有一个主机和一个从机进行通信。在一次数据传输过程中,主机总是向从机发送数据的8~16位,而从机也总是向主机发送一个字节数据。图2 为SPI的4种不同数据的传输格式的时序。
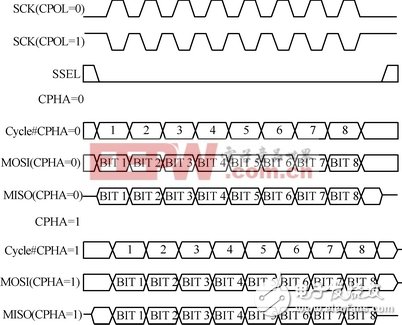
图2 SPI数据传输格式
在设置寄存器的过程中要注意CPOL为0和1时的不同以及SSEL、CPHA之间的关系。
SPI初始化的部分代码如下:
void MSIP_Init(void){
PINSEL0=(PINSEL0(~(0xff8)))|(0x558); //设置引脚连接SPI
SPCCR=0x52;//设置SPI时钟分频
SPCR=(03)| //CPHA=0,数据在SCK的第一个时钟沿采样
(14)| //CPOL=1,SCK为低有效
(15)| //MSTR=1,SPI处于主模式
(06)| //LSBF=0,SPI数据传输MSB(位7)在先
(07); //SPIE=0,SPI中断被禁止
}

图3接口电路
嵌入式微控制器与NRF24L01接口电路如图3所示。
这8个引脚分别和微控制器的GPIO口相连,微控制器在初始化是设置成相应的功能。GND为电源地;VDD为正电源1.9~3.6 V输出;CE为工作模式的选择,RX或TX模式;SS为SPI片选使能,低电平使能;SCK为SPI时钟;MOSI 为SPI输入;MISO为SPI输出;IRQ为中断输出。
接收端部分代码如下:
#include NRF24L01.h
unsigned int RxBuf[5]; //接收缓冲,保存接收到的数据
int main(){
NRF24L01_Initial(); //nRF24L01初始化
while((NRF24L01_RxStatus())!=1){//nRF24L01没有数据请求
*P_Watchdog_Clear=0x0001;
}
NRF24L01_ReceiveByte(RxBuf);//接收数据
while(1){
*P_Watchdog_Clear=0x0001;
}
}
3 实验数据与验证
图4是用本测试系统所测得的两条实验曲线。该曲线所测的是引信电池[8]的电压量。曲线可以分成两部分,一部分是电池电压随着时间的增加而增加,另一部分是随着时间的增加电压量保持不变。这是由引信的特殊结构所致。
经过实验论证,本测试系统在误差允许的范围内可以达到测量精度要求,从而验证了本测试系统具有较强的应用性。
4 展望
未来的嵌入式产品是软硬件紧密结合的设备,为了降低功耗和成本,需要设计者尽量精简系统内核,只保留和系统功能紧密相关的软硬件,利用最低的资源实现最适当的功能,通常都具有低功耗、体积小、集成度高等特点[9]。嵌入式系统和具体应用有机地结合在一起,它的升级换代也是和具体产品同步进行,因此嵌入式系统产品一旦进入市场,具有较长的生命周期和巨大的市场潜力。
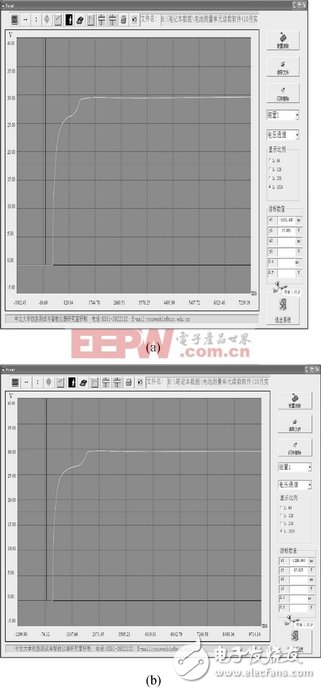
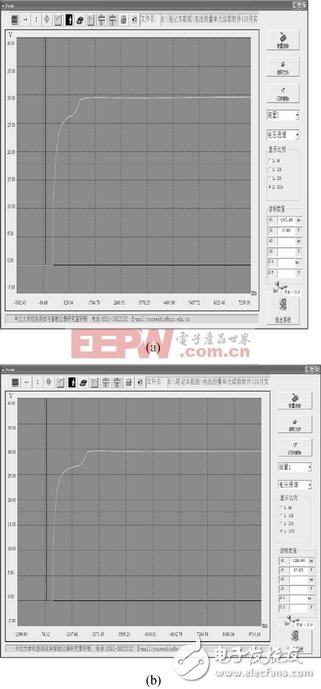
图4 实验曲线
- 相关推荐
- ARM
-
#硬声创作季 嵌入式系统原理:5.2ARM芯片实例---LPC21xxMr_haohao 2022-11-01
-
ARM7你们都还使用吗2014-04-23 0
-
LPC21XX(ARM7)仿真工程建立(IAR FOR ARM)2015-04-05 0
-
LPC2101 ARM7内核开发无刷电机控制系统2016-01-13 0
-
求ARM7系列lpc2478最小系统原理图2016-03-14 0
-
基于ARM7的SOC系统的设计2021-02-05 0
-
lpc21xx/lpc22xx应用开发指南2010-01-07 923
-
AN10324应用手册,在LPC21xx和LPC22xx上实2010-03-04 495
-
LPC21xx、LPC22xx系列32位ARM微控制器用户手2010-04-07 877
-
NXP LPC21xx系列ARM芯片在ucos下启动程序分解2012-02-03 931
-
LPC21XX初始化工具2013-09-06 631
-
ARM处理器lpc21xx_lpc22xx用户手册2015-12-30 916
-
基于NXP LPC21xx系列ARM芯片在ucos下启动程序分解2017-10-15 1198
-
ARM开发6.3.2 基础实训( 2 ) 单个数码 LED 的显示输出系统设计( 2 )--LPC21XX2021-12-04 289
全部0条评论

快来发表一下你的评论吧 !
