

基于LM567的红外线测速原理分析与设计
应用电子电路
描述
1、引言
在对机动车辆进行噪声、加速性能、最高车速、油耗等环保、安全、经济指标进行测试时,都需要对车速进行测量和控制,现有国家标准中所规定的车速测量方法大都采用电子计时装置或秒表,测量车辆行驶过一段固定距离所用的时间,然后求出平均车速。一般电子计时装置的处理器和显示器部分基本相同,只是测速传感器部分有所不同,而传感器的特性又直接影响到测量结果的准确性。目前常用的测速传感器有压敏传感器、COMS摄像头配合平行光源等,前者结构简单,但铺设比较麻烦,传感器易受损,长期使用后灵敏度降低,从而影响测量结果;后者灵敏度高,测量精确,但成本过高,涉及较多设备,对光源的摆放也有较高要求。
考虑到以上问题,笔者利用LM567设计出一种新的红外线测速传感器。这种传感器体积小、成本低,操作简单,使用方便,具有较高的灵敏度、准确性、稳定性和抗干扰能力,适用于测量车辆在一段固定行驶距离内的平均速度。
2、传统测速装置的工作原理
下面以测量摩托车加速噪声为例,介绍目前通常采用的传统测速装置的原理及其优缺点。图1是摩托车加速噪声试验的布置简图。
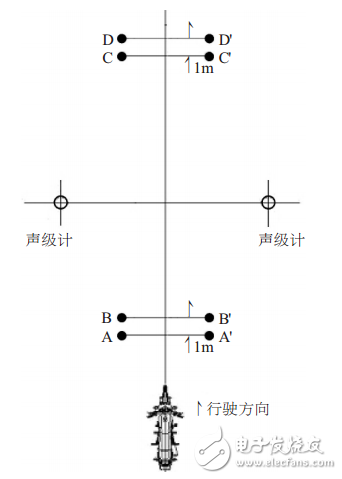
图1 试验布置简图
(1)对于采用压带路试仪的测速方法,分别在AA’、BB’、CC’、DD’处摆放压带并将压带与路面良好粘贴,AA’与BB’、CC’与DD’之间的距离(即测速区)为1米,用线缆将压带与路试仪按顺序连接,当车辆经过AA’处压带时,触发压带中的压敏传感器,该触发信号被送到路试仪中,使其内部计时装置开始计时,当车辆通过BB’时,再次产生触发信号使计时装置停止计时,利用路试仪的内部处理器,将通过AA’与BB’之间这段距离所用的时间转换为车速,并显示在液晶屏上。同理在CC’与DD’之间也可测得一个车速值,从而满足噪声测量的要求。这种测速方法工作原理简单,但铺设比较麻烦,传感器易受损,长期使用后会造成灵敏度降低,从而影响测量结果。
(2)对于采用激光路试仪的测速方法,分别在A、B、C、D四个位置摆放四个平行激光光源,在A’B’C’D’四个位置摆放四个接收激光信号用的CMOS摄像头,调整光源使其发出的激光对准摄像头中心,将摄像头按顺序连接至路试仪,当车辆经过AA’时,光线被阻挡,摄像头产生一个触发信号,使路试仪内部计时装置工作,当车辆通过BB’时,再次产生触发信号使计时装置停止计时,利用路试仪的内部处理器,将通过AA’与BB’之间这段距离所用的时间转换为车速,并显示在液晶屏上。同理可在CC’与DD’之间测得一个车速值。这种测速方法的灵敏度和测量精确度都很高,但是操作极其不便,每个激光光源都需要独立的电源供电,而且激光信号必须正对摄像头的中心接收点,对光源的摆放有很高的要求,否则传感器难以正常工作。
3、基于LM567的红外线测速传感器的工作原理
本文利用锁相环音频译码芯片LM567,设计出一种新的红外线测速传感器,其电路图及工作原理如下。
3.1、LM567的内部结构及功能
LM567专门用于解调某一单音频率的调制信号,其工作频率可高达500kHz。在工业自动控制、遥控遥测、保安报警等领域有广泛应用。
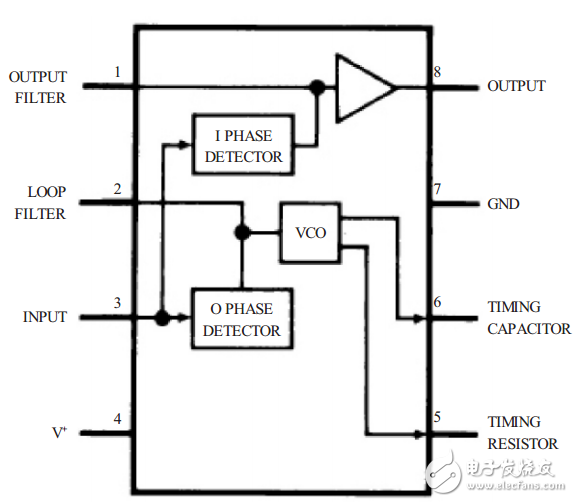
图2 LM567
LM567主要由正交相位检波器、锁相环和放大器等组成。其内部结构如图2所示。LM567的5、6脚分别外接定时用的阻容元件R、C,R、C决定了锁相环内部压控振荡器的中心频率f0,即f0≈1/1.1RC。电阻R跨接在5、6脚之间,6脚通过电容C接地(Uss)。若R取2~20kΩ,则LM567能解调出0.01~500kHz范围内的单音信号。LM567的1、2脚分别对地接一电容器,形成输出滤波网络和锁相环低通滤波网络,2脚上的外接电容器C2的容量决定了锁相环的捕捉带宽,其大小为Bw≈1070(Uin/f0C2)^1/2式中,Uin为由3脚输入的正弦波信号电压的有效值,要求Uin≥25mV,一般在100~200mV之间。1脚外接电容C1为正交相位检波器的输出滤波电容,其容量大小为2脚所接的电容C2容量的二倍以上,即应满足C1≥2C2。
(1)LM567作频率调制器
2脚接锁相环的低通滤波器的输入端。从2脚加入的调制信号经低通滤波器滤除带外杂音和噪声后,加至压控振荡器的中心频率f0进行调频,然后由5脚输出调频信号。调频信号的中心频率f0由接在5、6脚的RC阻容网络的参数来确定。用LM567作频率调制电路时只使用了它内部锁相环路的低通滤波器和压控振荡器。改变RC网络落的参数值,可实现对不同频率的调制。
(2)LM567作频率解调器
已调制信号从3脚输入,当输入信号的中心频率与LM567内的压控振荡器的中心频率f0相等时,环路的低通滤波器(2脚)输出已解调信号。
3.2、基于LM567的红外线测速原理
基于LM567的红外线测速传感器电路图如图3所示,LM567的内部振荡器提供方波信号,驱动四个LED向外发射红外线,其频率由R2和C4来决定。
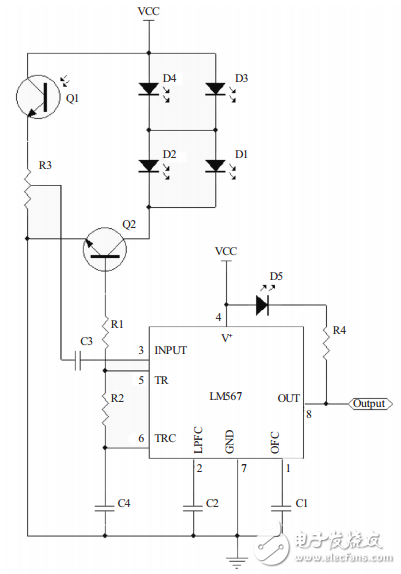
图3 红外线测速传感器电路图
将四个传感器分别放置在图1中A、B、C、D四个位置,当车辆经过传感器时,LED发出的红外线被车体反射,光敏管Q1接收到反射光,经三极管放大,转换成电压信号后送到LM567的内部鉴相器同步解调,然后由LM567内部的比较器转换为数字信号从8脚输出。该输出信号被传送到路试仪中,触发路试仪中的计时装置开始计时;同理,当车辆经过B点的传感器时,又会产生一个触发信号使计时装置停止计时,经过路试仪内部处理器运算从而得到车辆经过AA’和BB’时的车速。
LM567为锁相环音频译码电路,在电路中它是用来选频的,即只有当3脚输入信号的频率和LM567的内部振荡器频率相一致时,电路输出低电平,否则输出高电平。也就是说,只有当Q1接收到的反射红外线来自于其自身电路里的LED时,LM567才会输出一个从高变低的触发信号给路试仪。
该电路的最大特点是实现了红外线发射频率与接收电路工作频率的自动同步;即红外发射部分不设专门的脉冲发生电路,而直接从接收部分的检测电路引入脉冲(LM567的锁相中心频率信号),简化了线路和调试工作,避免了周围环境变化和元件参数改变造成的收、发频率不一致,排除了相邻传感器之间的互相干扰,使电路稳定性和抗干扰能力大大增强。
4、结语
基于LM567调制和解调功能所设计出来的红外线测速传感器,实现了红外线发射频率与接收电路工作频率的自动同步,有较强的抗干扰能力和稳定性,成本低,结构简单,可广泛用于汽车、摩托车等车辆平均车速的测量。
-
LM5672013-01-11 0
-
红外线自动控制水龙头的电路。2015-03-30 0
-
采用CD4011单通道红外线遥控器 电子资料2021-04-20 0
-
由LM567组成的红外线自动洗手器相关资料分享2021-05-21 0
-
lm567红外自动感应洗手器电路2008-07-21 2154
-
由LM567组成的红外线自动洗手器的设计2009-12-24 3989
-
反射式红外线感应电路原理及应用2011-03-04 6163
-
基于LM567的红外线测速方法2011-05-17 3087
-
简易LM567应用电路三例2012-01-11 21194
-
lm567红外线遥控开关电路图2014-05-16 9055
-
由LM567组成的红外线自动洗手器(五种红外线自动洗手器电路详解)2018-01-18 32992
-
lm567芯片资料数据手册(lm567管脚图_作用_工作原理_应用电路)2018-01-18 59195
-
音调解码器567详解,Detail of tone decoder LM5672018-09-20 1354
-
用LM567制作一个红外线捕鼠箱2019-01-29 5453
全部0条评论

快来发表一下你的评论吧 !
