

学习及使用PID库,轻松掌握PID
区块链
描述
每个接触PID的人,都知道PID的公式吧:
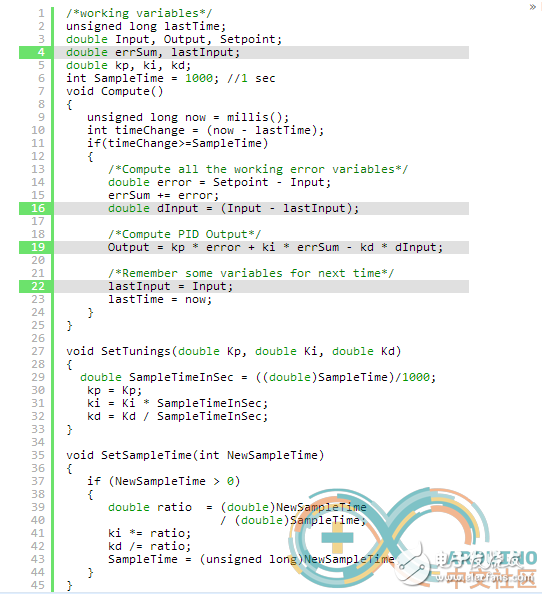
然后根据这个公式,就可以编出计算output的arduino程序如下:
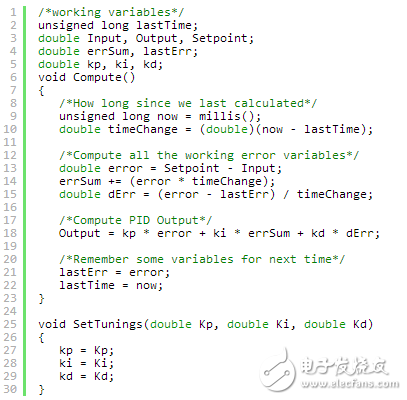
注:程序源码可以在原文上复制。
可是在上面的程序中,当PID不规则的调用时就会出现两个问题:
1.有时候定时调用,有时候又停止调用,将得不到PID的持续稳定特性。
2.需要额外对积分和微分进行数学计算,因为他们都是和时间息息相关的。
解决方法:保证PID在一个固定的的时间间隔内被调用,我通过每个周期内事先设置好的采样时间调用compute函数,PID再决定是计算还是立即返回数值。一旦我们知道PID在固定时间间隔内被调用,积分和微分的计算就能被简化。
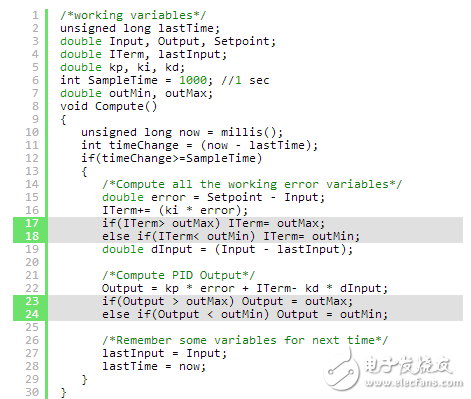
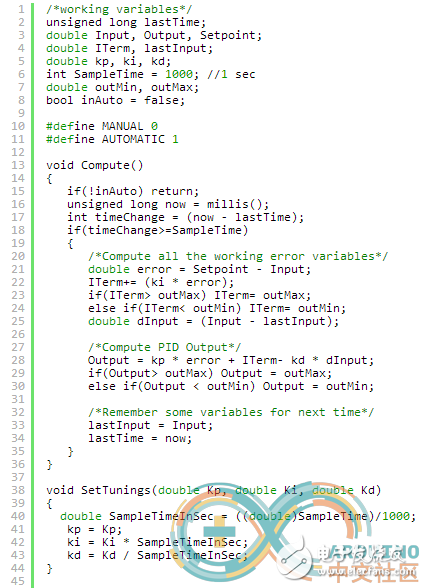
于是我们的程序就变成了:
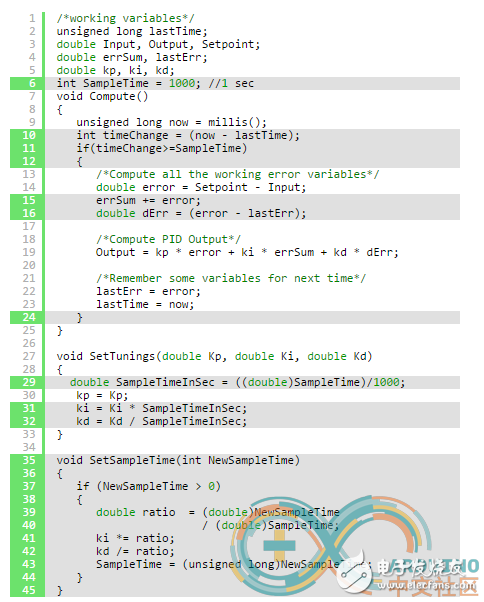
灰色部分是新加的语句。
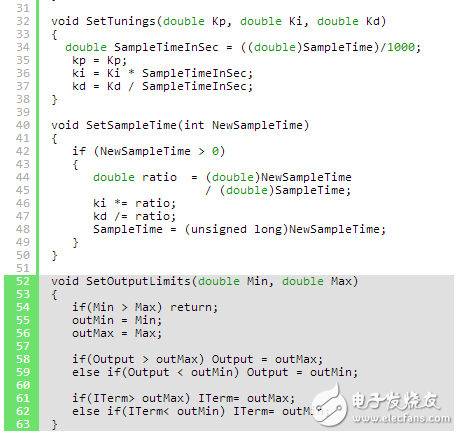
在这个新的程序中,作者在29行把时间转化为秒。这样可以简化运算。同时新加入后面两个函数把PID参数转化为以秒为基准的参数。
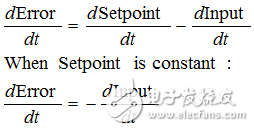
当上面的PID程序在运行中,可能会出现微分过冲的问题。
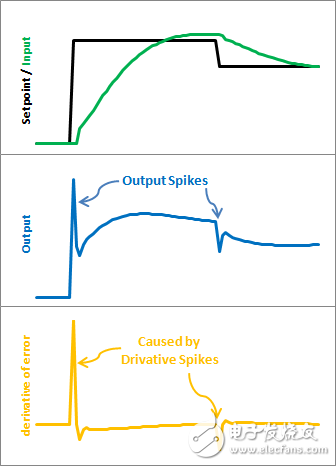
看上面的图,因为error=Setpoint-Input,只要Setpoint发生改变,就会导致error的值发生一个突变。在微分运算里这种微分值的突变是无穷大的。
解决方法:
于是我们的程序就变成了:
可以看到我们只是用-dInput代替掉了+dError。
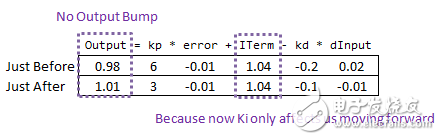
当我们的PID在运行的时候,这个时候改变PID的参数,会导致输出发生变化,如:
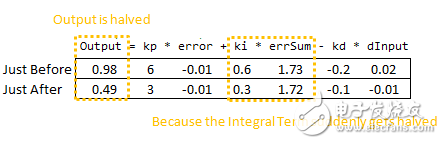
我们只是把ki的值减少一半,输出就减少了一半。为什么会这样呢?可以从下面的积分公式里找到原因:
这就解释了为什么KI没改变之前系统工作的一直很稳定。突然,你乘了一个新的KI值与之前的偏差累计总和。这样带来的变化不是我们所希望的,我们只想改变后能朝着我们希望的方向发展。
解决方法:解决的方法有很多,我在最新的Arduino PID库里使用的方法是重新调整errSum(偏差总和).KI变为原来的两倍时,把errSum变为原来的一半,虽然这个方法有点笨拙,下面有更加明智的方法。这个方法要求有基础的代数基础或者计算技巧。
把KI乘到里面,虽然看起来没什么变化,但是我们将会看到这个小变化带来了很大的不同。现在我们将error和Ki相乘。并且把乘积和保存起来,当Ki变化时,这时不会有很大的变化了,因为之前的KI的乘积和值已经存储起来了。
于是我们的程序就变成了:
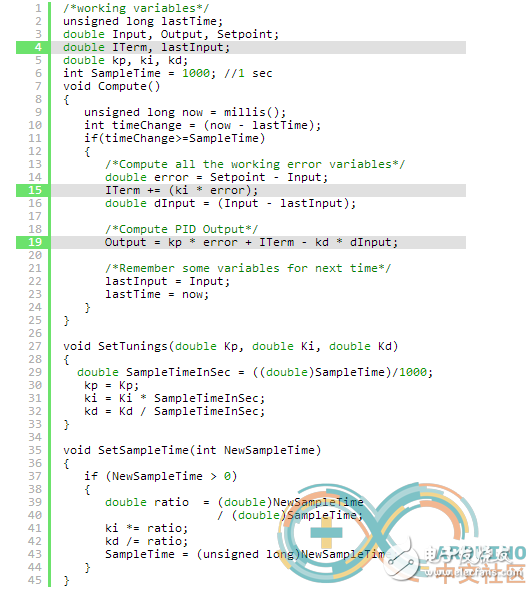
这样,我们再改变参数,输出也不会发生很大的变化。
本帖最后由 对折之内 于 2015-4-13 19:17 编辑
当我们的PID在运行的时候,有时候会发生摆尾的情况。如图:
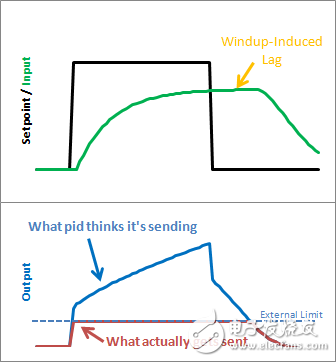
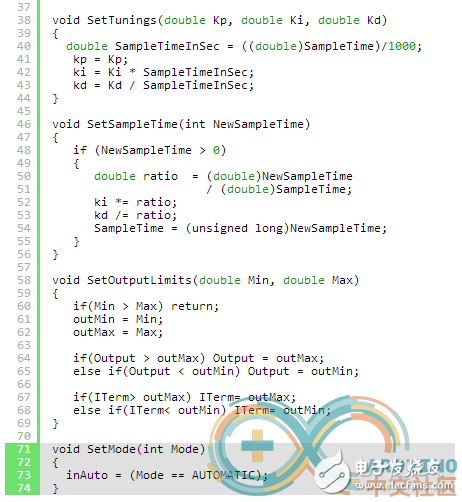
这种情况发生在PID认为它能做一些它实际上做不到的事情时。比如最大只能输出255,可是PID输出了300。原因在于PID并不知道最大的输出只能为255。所以我们在程序里给PID的输出值加一些限制。告诉PID可以输出的最大值为多少。我们的程序就变成了:
当有的时候,你不需要使用PID计算的输出值,想用自己设定的值。(比如想让输出为0),则你的程序可能会这样写:
void loop()
{
Compute();
Output=0;
}
这样的话,不管PID想输出什么,程序始终输出0。这样就会使PID变得很迷惑:“我尝试着改变output,却什么都没有发生,怎么办?我把改变的力度增大吧。”这样,当你停止使用自己设定的值作为输出,重新使用PID作为输出时。PID输出很大的值,这样系统就乱套了。
因此我们要在程序里,加一个开关,在我们使用自己设定的值时,把PID关掉,不让它进行计算。
我们的程序就变成了:

在上面的程序中,我们给PID加了一个开关,但是当我们把PID的开关打开,重新回到PID的时候,会发生下面的情况:
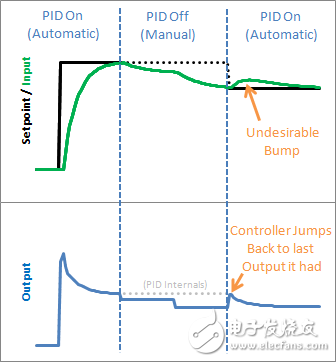
没错,PID的输出值会跳回成它发出的上一个输出值。并且从那个值开始来调整自己。
因此当开关重新打开时,我们需要一个初始化函数,来重新初始化一下数据,先看程序:
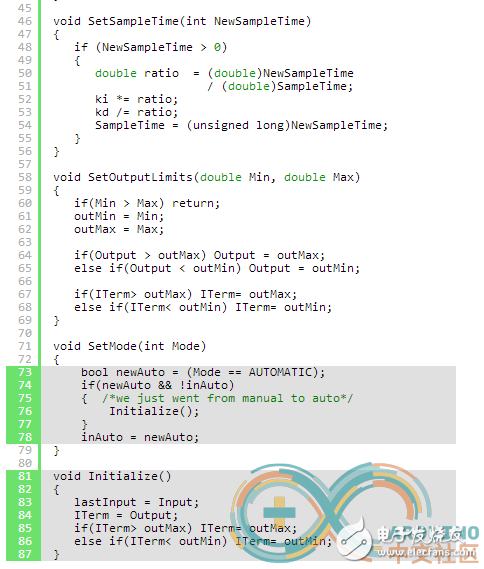
可以知道,当换模式的时候,会执行Initialize()函数,把lastInput的值更新成现在的采样值,把ITerm的值更新成output的值,这样就避免了第一次执行PID时的跳变了。
-
PID学习2012-08-11 0
-
【安富莱——DSP教程】第15章 ControllerFunctions的使用(PID控制)2015-06-13 0
-
【最新课程推荐】PID控制算法2016-10-12 0
-
掌握PID算法2021-09-13 0
-
CPU调用PID软件功能和DSP PID库之间的性能差异2023-08-30 0
-
数字PID控制实验2009-05-15 7677
-
S7-200 PID学习教材2011-04-19 1146
-
pid算法_什么是pid算法2012-01-01 10688
-
PID学习算法2016-06-17 398
-
PID学习教程2017-01-22 498
-
什么是PID控制?2019-07-18 28945
-
PID控制中如何整定PID参数2021-06-01 1995
-
PID算法学习笔记2022-01-14 393
-
电机PID实验--一文让你看透PID2022-01-14 484
-
PID整定相关的专业知识讲解2022-05-02 3720
全部0条评论

快来发表一下你的评论吧 !
