
资料下载


×
_基于Arduino的体感机械手设计
消耗积分:3 |
格式:rar |
大小:1.31 MB |
2018-01-22
分享资料个
近些年来,科技行业发展突飞猛进,各种新鲜名词不断涌现,比如“AR’、 ‘.VR’、 “体感’ “全息投影”等等。在制造业,随着2013年“工业4.0”这一概念被德国联邦教育部和联邦经济技术部提出,工业迎来了新的革A’ “互联网+”和工业技术的相互结合,更多的智能化的产品逐渐面世。而文中则将当下较为热门的“体感”操作和传统工业中的“机械手”相互结合,探索一种全新的机械手操作方式——体感操作机械手。区别于传统的机械手的示教编程的操作方式,体感机械手利用体感传感器,通过人的手势变化进行操作,并且通过无线方式传输控制信息。这种操作方式使得机械手有了更为广泛的使用范围,具有较强的实际意义和实用价值。
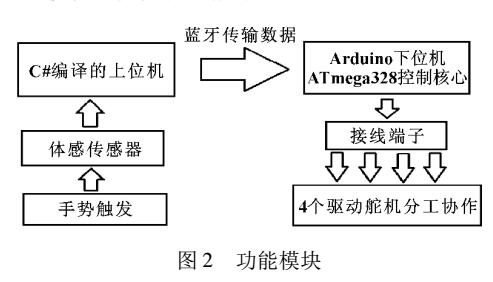
区别于传统机械手的操作方式,提出并设计了一种体感操作机械手。该手势感应机械手共有5个自由度,采用了上位机和下位机联合工作的模式。利用C#编译的上位机负责数据的读取和内部运算,将体感传感器Leap Motion获得的坐标信息转化为实际所需的关节舵机旋转角度,并且通过蓝牙4.O模块实时传输给下位机。下位机采用Arduino nano单片机,负责数据的接收和控制舵机的角度值,通过PWM信号传输给模拟舵机,达到预期的操作,且可以在较远的距离内实现对人手臂、手指动作的模仿和小型零件的搬运。

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章







