

超声波测距原理与高精度液位测量系统解决方案
测量仪表
描述
超声波测距具有一系列优点,但影响测量精度的因素有很多,因此难以达到较高的精度。在超声波测距原理基础上,针对单超声波换能器温度或温、湿度补偿方案单一,不能在多变、恶劣环境下实现高精度测距的缺陷,以及双超声波换能器标准挡板补偿方案成本高,不能广泛应用在各个领域中的缺陷,设计了借助舵机控制超声波换能器方向的单超声波换能器标准挡板补偿方案。并针对无法精确捕捉第一个回波前沿的要求,提出了使用可编程增益放大器捕获不同距离返回的回波前沿。实验结果表明,在7 m范围内,以空气作为传播介质,反射面为水等具有良好发射性能物质时,测量误差控制在0.4%内,该改进方法能够在恶劣多变环境下实现低成本的高精度测距。
0引言
目前,液位测量的方法有很多,如浮子式液位测量、投入压助式液位测量、微波雷达液位测量、红外液位测量、激光液位测量和超声波液位测量。其中,以接触式测量为代表的压力式传感器在多泥沙等场景中使用会受到污染,继而产生较大误差。而对于非接触式测距系统,微波雷达液位测量的实现技术难度大、成本高;红外液位测量成本低、易于实现,但方向性差、精度低;而超声波液位测量既可以做到不接触液面,避免了液体污染和腐蚀对测量设备的影响,且不受光线、烟雾、电磁干扰,具有分辨率较高、系统结构简单、安装方便、成本低等优势。
超声波测距方法主要有相位检测法、声波幅值检测法和渡越时间检测法。相位检测法虽然精度高,但测量范围有限,因而应用较少;声波幅值检测法精度低、易受反射波影响;而渡越时间法介于前两种方法之间,精度较高、测量范围较广,被广泛使用。
在实际应用中,测距系统的设计对测距精度影响很大,因此分析超声波测距的工作原理和流程,改进测距的方式和方法,提高超声波测距精度的研究越发引起重视。根据测距系统应用具体环境的不同,提高精度的方法也略有差异。本文围绕减小外界环境的影响、超声波频率的选择等方面进行分析,结合具体系统的实现,提高了超声波液位测量精度。
1超声波测距原理
用于距离测量的超声波,通常是由压电陶瓷的压电效应产生,这种压电陶瓷传感器有两个压电晶片和一个共振板,当两级外加脉冲信号的频率等于压电晶片的固有振荡频率时,压电晶片将发生共振,并带动共振板振动,从而产生超声波;当共振板接收到超声波时,将压迫压电晶片产生振动,将机械能转换成电信号。
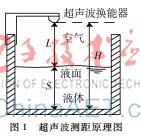
超声波测距原理如图1所示。利用已知超声波在空气中的传播速度v,超声波换能器垂直向液面发射超声波,声波在水面与气体的分界面发生反射,并回传至超声波换能器,记录传播时间t,即从发射超声波信号到接收到超声回波信号所经历的时间,可得换能器到液面之间的距离L=0.5vt,继而得出实际的液面高度为:
S=H-L=H-0.5vt(1)
2影响测量因素及解决办法
根据式(1)可知,影响超声波测距精度的主要因素是超声波传播速度和超声波传播时间。此外还有影响测量范围和精度的超声波频率。这里,不研究讨论传播时间,只对其他两个方面产生的误差进行研究分析,并提出合理的解决办法。
2.1超声波传播速度
大多文献提出使用温度校正方法对声速进行补偿,其传播速度公式为v=331.5+0.607T,其中,T为温度(℃)。而后,提出了温度、湿度双补偿方法,其传播速度公式为:
其中,pw为水蒸气的分压强,p为大气压强,T0为绝对温度,t为测量的空气温度,v为经补偿后的超声波波速。笔者认为实际空气并不是完全干燥的,对空气平均摩尔质量和比热比值进行修正,该方法虽然多考虑了湿度对声速的影响,但实际环境条件下,传播速度还与传播介质、风速、压强等因素有关,因此测量结果仍存在较大误差。
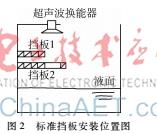
基于环境对传播速度的影响,有文献提出标杆测量方法,其原理是采用双通道的方法,一个通道用于测量超声波传播速度,在超声波换能器前安置一个已知距离的标准挡板,通过测量超声波到达该挡板的时间差以计算超声波在该环境下的传播速度;另一通道仍按正常测量方法测量距离。于是,提出如图2所示的标准挡板安装方式,该方法可以实现较高精度测量,且适应各种复杂环境,但对于标准挡板的安装有严格的要求,因此相应计算比图3双超声波换能器安装位置图较繁杂,且实际环境的不确定性可能导致超声波到达挡板的过程中经多次反射产生无用超声波,影响测量精度。于是,提出采用双超声波换能器,如图3所示。一个用于测量传播速度,一个用于测量传播时间,互不影响。虽然该方法减小了计算复杂度,且消除了无用超声波,提高了测量精度,但两个换能器的成本比较大,不利于普及。
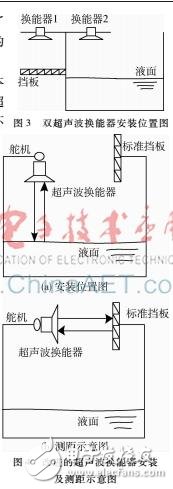
基于上述研究分析,本文提出采用舵机控制单超声波换能器方向的方法,不仅将影响传播速度的影响因素考虑在内,还降低成本,利于在各个领域中普及。如图4所示,标准挡板垂直放置,且与超声波换能器置于同一水平线上,两者之间距离固定,且大于超声波换能器盲区的距离;由舵机控制超声波换能器的方向,单片机发送指令使舵机控制换能器垂直面向液面,并发送超声波测得传播时间,继而控制换能器转动90°,垂直面向标准挡板,并发送超声波测得传播速度。
2.2超声波频率
超声波在空气中传播的波动方程为:

其中,A为超声波换能器接收的振幅,A0为超声波换能器发射的初始振幅,x为超声波的传播距离,ω为超声波的角频率,t为超声波的传播时间,λ为超声波波长,α为超声波的衰减系数,其公式为α=bf2,其中,b为介质常数,f为超声波频率。
根据式(3)可知,超声波在空气中的传播距离达到0.5α时,超声波的振幅衰减为原来的1/e。超声波频率越高,衰减越严重,可检测的距离范围越小,但发射的超声波扩散角越小,波束越细,指向性越好。
提出使用双比较器整形以确定回波前沿的方法,但由于实际测量环境的不确定性,设置的两个比较器阈值可能都太小或太大,导致测量精度降低。基于此,本文提出使用可编程增益放大器PGA112,通过多次的增益校正提高捕获第一回波前沿的精度。
3软件设计
3.1程序设计思想及相关注意点
为实现高精度液位测量,该软件要完成的工作:
(1)产生40 kHz超声波;
(2)测量超声波的传播时间;
(3)控制舵机转向,以达到控制超声波换能器发射、接收端方向;
(4)测量超声波的传播速度;
(5)根据距离的远近选择适当的超声波频率作为检测对象;
(6)计算液位高度,进行数据显示等相应动作。该装置40 kHz的脉冲串由软件产生;对超声波的传播时间和传播速度的测量,以及舵机的转向控制采用单片机的定时/计数器完成。
编写系统程序时考虑硬件连接的同时,还要考虑设置存储空间、寄存器和外部中断引脚的使用等。另外,因为有余振和折射波绕射的存在,因此在发射超声波结束后需要延时一段时间才能接收回波进行相应处理。
3.2主程序流程
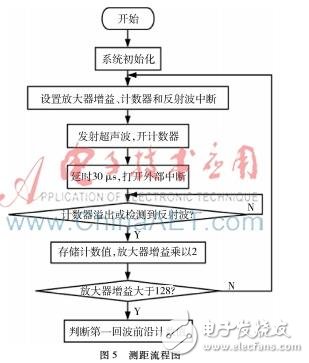
系统采用模块化程序设计,包括主程序模块、超声波传播时间测量模块、舵机转向模块、超声波传播速度测量模块、液位计算模块、数据显示等相应动作模块。系统初始化后,使用while(1)语句实现如下无限循环:首先调用超声波传播时间测量模块,发射超声波的同时,打开计数器开始计时,并关闭外部中断。延时1 ms,再打开外部中断,等待回波。当检测到回波时,在外部中断程序停止计时器计时,把定时器的值存储起来,同时回波接收标志位置1。接着调用舵机转向模块,打开计数器开始计时,且控制位置1,当脉冲宽度大于2.5 ms,控制位置0;计数满3 ms,则计数器清零,使舵机转向90°。然后调用超声波传播速度测量模块,通过标准挡板的固定距离计算得出声速。舵机转向模块中,设置脉冲宽度为1.5 ms,使得舵机转向0°。最后单片机调用液位计算程序并进行数据显示等相应动作。其中,软件设计的测距程序流程如图5所示。
4实验结果与分析
本系统将软件固化到STC12C5A60S2单片机上。为验证超声波液位测量系统测量效果,在室外选取一个流速相对平稳的水罐进行测量,通过控制阀门实现水位变化,该系统安装在距离罐底7 m的位置。采用3次测量取平均值的方法,减小系统随机误差。
测量结果与水尺测量数据进行对比,如表1所示。根据实验测量和误差分析,该系统测量盲区为30 mm,测量误差基本控制在0.4%,实现了高精度测距,能够满足工农业生产中的测量需求。

5结束语
超声波液位测量系统中,在充分分析超声波测距误差原因的基础上,针对超声波传播速度的测量,根据环境因素的影响以及成本问题的考虑,提出了利用舵机控制超声波换能器方向以达到节约成本、简化设计又全面考虑环境影响因素的挡板补偿修正方法,该方法是目前在液位测量相关文献中尚未提及的方法和技术手段。针对第一超声回波前沿的精确捕获,采用了增益可编程方法,提高了对第一回波前沿的捕获,从而提高了测距的精度。在以节能环保简约为主题的工农业应用中,该改进方法以其独特优势,成为超声波液位测量的新思路。
-
超声波测距系统设计2008-10-15 0
-
超声波测距系统毕设2016-04-18 0
-
超声波液位计在工业中测量液位的应用2017-12-01 0
-
液位超声波传感器技术参考资料2017-12-06 0
-
【转】在工业领域超声波液位测量技术原理2018-05-10 0
-
基于STM32超声波测距设计的合集2018-09-05 0
-
基于单片机的超声波测距系统有什么优点?2019-10-25 0
-
超声波传感器测距系统如何设计2020-04-23 0
-
外贴式超声波液位开关的优势分析2020-05-27 0
-
超声波液位传感器的测量原理2020-12-01 0
-
超声波液位传感器在半导体纯水储存罐液位变化监测应用方案2021-10-28 0
-
如何去设计一种STM32单片机的高精度超声波测量系统2021-12-06 0
-
超声波式液位传感器的应用2023-05-05 0
-
基于STM32单片机的高精度超声波测距系统的设计2017-09-28 1153
-
STM32单片机的高精度超声波测距系统设计2019-10-17 7739
全部0条评论

快来发表一下你的评论吧 !
