

详解跟踪感应器的信号路径
模拟技术
描述
感应器在嵌入式系统中的使用日趋频繁。在工业产品领域,感应器长期用于制造控制系统,而在消费设备领域,感应器的使用方兴未艾。在消费产品中集成感应器,可为用户提供更为出色的用户体验,例如为移动电话添加加速计功能,以及为微波炉添加水蒸气感应功能等。
以前仅涉足数字设计的工作人员现在发现自己还必须考虑与模拟感应器相连接的问题。感应器的模拟信号需要进行数字化后才能被系统使用,信号路径需要经过几个不同的阶段,包括放大、过滤和数字化等(见以下图 1)。信号一旦数字化之后,用户就能将其发送给微控制器上的控制处理系统,或者处理数据并通过通信协议将其传输给主机处理器,这样主机就可以根据需要使用感应器数据。
上述每个阶段通常都要使用一个相应的组件,该组件周边应当配合使用无源组件,以确保既定应用的正常工作。
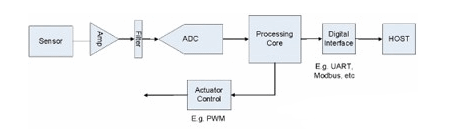
图 1:感应器
感应器
每个感应器的输出信号和感应距离各不相同。输出信号可以是基于电压、电流、电阻、电容或频率的,不过由于相关的标准严重不足,它们仅应用于特定的工业系统中。即便同一家制造商推出的类似感应器的输出也可能不尽相同,上述差异可能会给系统设计人员造成不便。设计人员必须选择符合系统要求的感应器。如果在设计过程中系统要求出现出现要求变化,感应器可能也需要做相应改变。此外,如果采用的新感应器的输出略有不同,则还可能需要改变放大和过滤级。由于大多数感应器输出的是较低的电流或电压信号,因此本文主要讨论这种类型的感应器,另外,我们可以并通过简单的电阻网络将电流信号转变为电压信号。请留意:基于效率的考虑为提高效率,本文对某些概念和器件组件选择过程进行了一定程度的简化。
感应器的输出可能为几毫伏,也可能高达几伏。为了使信号被正确数字化数字化,感应器的输出应当足够大,这样才能确保模数转换器 (ADC) 有效读取信号。在大多数情况下,感应器信号都应当被放大。例如,典型的 K 类热电偶输出值为 41uV/°C,这就需要对该值进行充分放大,这样用户才能得到1C的精度。因此,设计人员必须考虑 ADC 的解析度,确保信号足够放大,以便实现所需的精度粒度。
放大
放大器的选择主要取决于所需的类型,比如需要的是仪表放大器、差分放大器、运算放大器还是可编程增益阵列等,此外选放大器需要还要考虑到增益的大小。放大器增益由放大器周边带反馈的电阻网络设置。标准放大器的最大增益在理想状态下是无限的。PGA 增益通常由发送到设备的数字信号设置,其会改变内部电阻网络。PGA 的最大增益比传统的放大器而言更加有限,主要在 0.5 倍到数千倍之间,不过在大多数情况下这样的增益范围已经足够了。
选择放大器需要考虑的另一重要规范就是偏置电压 (VOS)。VOS 是指信号通过运算放大器后会额外改变的的电压。例如,如果一个 500-mV 信号输入单位增益 (1x) 放大器且 VOS 为 10 mV,那么输出电压就是510 mV。如果感应器的输出范围为 0-900mV 且系统不需要对感应器进行非常线性化的读取,偏置就可以忽略。如果感应器输出范围为 450-550 mV,则偏置就可能难以接受了。在选择放大器时,VOS 越小,成本就越高。由于所有放大器都有偏置,因此需要着重重要的是考虑系统能否承受这个VOS。VOS 还能通过相关双采样进行减小或消除。
在所有系统中,感应器信号都会受到噪声的影响。噪声的来源有很多,如板的布局、无线电、热噪声甚至感应器本身等。信号噪声不仅会导致 ADC 的读取不准确、不稳定,而且噪声经过放大环节后还会增强,从而加大信号的误差。信号噪声可分为低频、高频或已知特定频率噪声。大多数情况下,我们需要解决的是高频噪声问题。
我们可通过不同的方法过滤噪声,包括无源模拟过滤器、滤波 IC 和数字过滤等。而无源过滤是最常用的方法,其需要建立包括电阻、电容和电感的无源网络。无源过滤器的问题在于,这种过滤器必须经过相应设计且难以改变。随着所需过滤器级别的增加,过滤器设计可能愈加复杂。一级切比雪夫滤波器的设计工作相对于八级贝塞尔过滤器而言就要简单得多。因而,设计人员在选择采用何种滤波过滤方法之前首先需要明确所需滤波器过滤器的阶数级别。
滤波IC 允许设计人员 对所需的过滤器类型进行数字编程。这种 IC 通过内置的不同类型模拟电路创建滤波器过滤器,且可能带有与其自身相关的偏置电压。这种 IC 还能帮助设计人员在 ADC 量化之后再启动滤波进程。数字过滤器的设计可能非常复杂,不过高阶滤波器高级别过滤器的设计工作可通过一些现有的工具加以简化。数字过滤也可成为删除噪声的一种理想方式,不过这通常需要占用大量的 CPU 资源,进而也会增加电力消耗。
数字转换
为了使用感应器的经滤波后的信号,我们必须通过 ADC 将模拟信号量化为数字值。对 ADC 的选择通常要考虑到系统对采样速率和分辨率的要求。所需的采样速率与感应器的带宽或系统的更新频率有关,而分辨率则取决于对感应器信息做出反应所需的最细精度。
系统的使用模式决定着上述速率和分辨率要求。例如,用常见的陀螺仪检测 360 度旋转情况,每度对应 0.67 mV 的电压,这样其输出电压就是 241 mV。玩具直升飞机可能需要粒度为 1 度的陀螺仪提供信息,不过要需要 10Ksps 的吞吐量才能保证直升飞机垂直。根据上述要求,我们可能需要采用 10位 ADC,每一位对应 0.35°(请注意,信号仍受噪声影响,在此基础上误差为±1位都可以接受)。与此形成对比的是,支持图像稳定功能的数码相机则需要 0.02 度的粒度及较低的 5Ksps 吞吐量,这样就能在相机抖动时调节图像感应器。根据上述要求,我们需要采用 16 位的 ADC,每一位对应 0.005°。
ADC 的准确度通过积分非线性 (INL),、差分非线性 (DNL)、偏置误差、增益误差和信噪比 (SNR) 进行衡量。综合考虑上述因素,我们就能了解 ADC 的总误差。第 S10 页上的图 2 分别显示了每种误差并将其整合在一起。对大多数应用来说,我们都不需要考虑上述这些 ADC 规范,不过工作认真的工程师仍应了解所用 ADC 的有关具体数值。
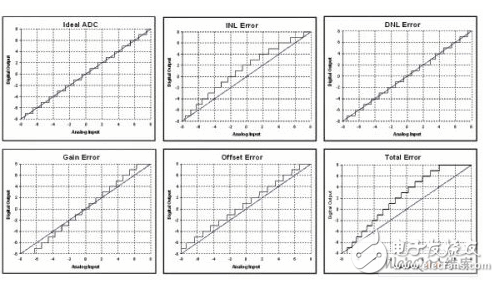
图 2:结合比较积分非线性、差分非线性、偏置误差、增益误差和信噪比,有助于我们了解 ADC
选择 ADC 时,用户可选用外部 ADC 或集成 ADC 的微控制器。外部 ADC 的性能通常较高,在速率、分辨率以及精度要求方面都表现较好。不过大多数感应器应用都能通过集成微控制器 的ADC 得到满足。
我们还可选用可配置的 ADC,这种 ADC 微控制器中包括有可编程的逻辑块。集成式数字和模拟可编程块使我们可以动态定义可配置的外设,优化用于具体的感应器应用,如计数器、PWM、UART、SPI、放大器、ADC 和 DAC 等。开发人员还能实现信号实施放大和过滤级,在单一器件中集成整个模拟信号链(见以上图 3)。
可配置的 ADC 相对于无源组件而言有助于大幅简化设计。此外,考虑到相关模块有关块可以动态再配置,开发人员还能选择重复使用这些系统资源来实现其他功能。
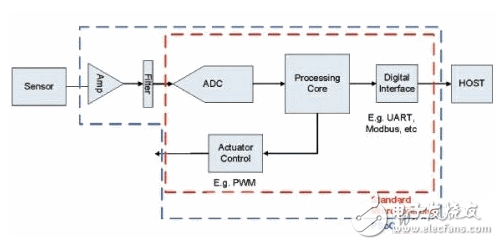
图 3:开发人员可实现实施放大和过滤级,在单一器件中集成整个模拟信号链
感应器不断向更广泛的市场领域渗透,为开发人员带来了更多的可控性及更强的 灵活性。通过对环境的管理(如温度监控),感应器提高了可靠性,又而通过反馈机制提高了整体的性能,此外还能实现各种新型用户界面,诸如此类的应用非常广泛。对众多设计方案而言,微控制器上的集成式 ADC 即能提供足够的分辨率粒度和准确性。不熟悉模拟设计的开发人员在感应器和 MCU 之间的模拟信号链方面可能会遇到麻烦。
实施多级模拟信号路径看上去比较复杂,特别是对于主要从事数字领域设计工作的人员来说尤其如此。但是,通过将模拟信号链分解为各种不同的放大、滤波过滤和 ADC 等不同阶段,数字开发人员就能更方便而准确地获取感应器数据,进而满足多种工业和消费应用的需求。此外,利用市场上已有的 IC、可配置 ADC 和滤波器过滤设计工具,感应器的设计工作可得以大幅简化。
-
手机感应器电路2012-02-09 0
-
如何用电脑并口读感应器的开关状态。感应器是24V。2014-07-24 0
-
大神为你解答什么是光线感应器?2014-08-04 0
-
一般的光电感应器与光纤感应器输出是模拟信号还是数字信号?2016-07-04 0
-
如何干扰红外感应器?2018-06-12 0
-
超声波感应器的使用2019-07-24 0
-
光线感应器怎么设置2019-12-10 0
-
如何使用超声波感应器2022-11-11 0
-
嵌入式系统中跟踪感应器的信号路径2010-04-19 628
-
光线感应器原理_光线感应器有什么用2017-11-23 8978
-
光线感应器原理_光线感应器的作用2019-09-10 8721
-
感应器的工作原理是什么2021-03-23 38992
-
常用感应器接线方式分类2023-01-16 11004
-
人体感应器什么原理 人体感应器用东西挡住还可以感应吗2024-01-23 972
-
感应器传感器工作原理 感应器传感器怎么安装接线的2024-02-14 3610
全部0条评论

快来发表一下你的评论吧 !
