

基于CAN总线的在线更新机制的设计实现
工业控制
描述
0引言
分散型控制系统中的现场终端一般由控制器和各检测模块构成,它们之间通过一定的通信网络建立数据的交换链路。这种系统具有高可靠、开放性、灵活性、协调性、易维护等优点。然而,该分散型系统也具有终端数量多、分布范围广的特点。一旦终端系统软件存在缺陷或用户提出新的功能和指标要求时,其升级、维护的工作量和成本都非常大。本文针对上述情况,设计了一种方便、灵活、快速及稳定地对MCU节点进行在线更新的机制。基于LPC11C24微控制器组成的CAN网络,采用IAP编程技术(In Application Programming),实现了对目标节点MCU的软件更新功能。
1 LPC11C24单片机和CAN总线
恩智浦半导体(NXP)推出业界首款内嵌易用型片上CANopen驱动,集成高速CAN物理层收发器的微控制器LPC11C22和LPC11C24.作为一种独特的系统级封装解决方案,LPC11C22和LPC11C24集成了TJF1051CAN收发器,在低成本LQFP48封装中实现了完整的CAN功能。
控制器局域网络(Controller Area Network,CAN)是由研发和生产汽车电子产品着称的德国BOSCH公司开发了的,并最终成为国际标准(ISO11898)。它是国际上应用最广泛的现场总线之一。近年来,其所具有的高可靠性和良好的错误检测能力受到重视,被广泛应用于汽车计算机控制系统和环境温度恶劣、电磁辐射强和振动大的工业环境。
2在线更新机制架构
系统架构主要由2部分组成:由各个MCU组成的CAN网络;安装在PC机上的USB-CAN通信卡,可以使PC机连上CAN网络,进行数据通信,系统构架如图1所示。软件也包括2部分:运行在PC机的上位机软件,提供用户操作界面,将应用程序代码通过CAN总线发送给节点;运行在节点的启动程序,主要是响应下载命令,接受代码,把代码写入FLASH,引导应用程序。
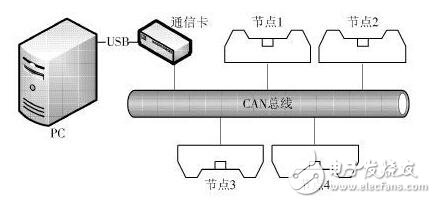
图1 系统架构
3在线更新机制的设计
3.1 IAP编程技术
IAP是应用在FLASH程序存储器的一种编程模式,即在某段程序的控制下完成对FLASH的读/写操作,可以控制对某段、某页、甚至某个字节的读写操作。
LPC11C24单片机支持并提供9条IAP命令:
①准备写操作的扇区;
②将RAM内容复制到FLASH;
③擦除扇区;
④扇区查空;
⑤读器件ID;
⑥读Boot代码版本;
⑦比较;
⑧重新调用ISP;
⑨读UID.
3.2 FLASH空间分配
LPC11C24有32KB的FLASH空间,共分为8个扇区,每个扇区的大小为4KB.为了使程序更新和应用程序更加独立,本文将FLASH空间分为3个区,分别为启动程序区,应用程序区,用户数据区。
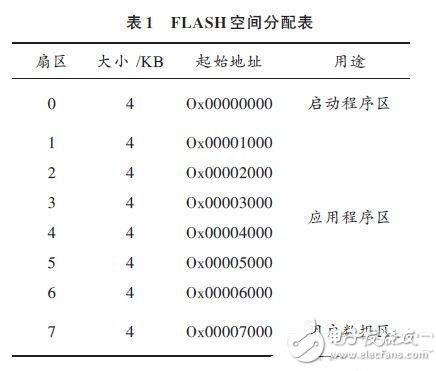
其中①启动程序是一段特定的驻留代码,专门用于接收来自主机新的代码,将其烧写到相应的FLASH空间,完成后跳转到应用代码区去执行新的程序,代码比较少,编译生成的映像文件小于4KB,每次系统上电或重启后先执行启动程序。
②应用程序是真正实现用户功能的代码。
③用户数据区是用于存储应用程序的一些设置和数据。
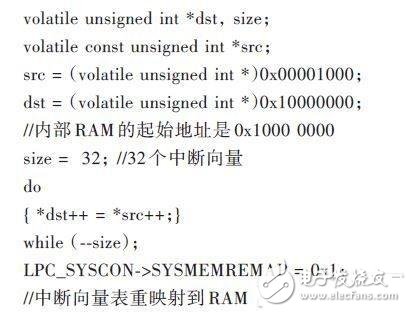
3.3中断向量表重映射与复制
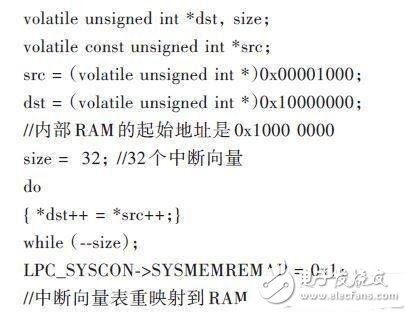
LPC11C24支持32个向量中断,中断向量表默认位于FLASH的第一个4KB空间,地址从0x00000000~0x00000079.按照前面的设计,启动程序占用第一个4KB的空间,当跳转到应用程序时,实际的中断向量表是位于0x00001000~0x00001079的空间。但LPC11C24系列的单片机不支持自定义中断向量表的地址,只支持将中断向量表从FLASH重映射到RAM.
为了能让应用程序实现正常的中断处理,启动程序在跳转到应用程序之前还需要将应用程序的中断向量表复制并映射到RAM[10].
代码实例如下:
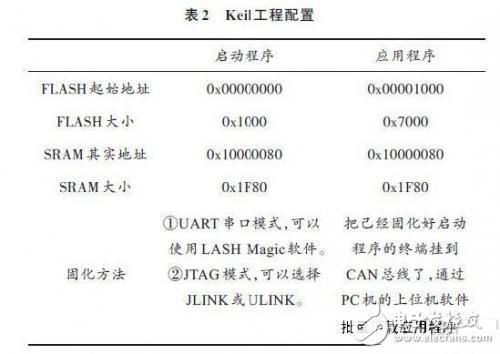
3.4启动程序和应用程序的设计与固化
程序都在Keil for ARM集成环境下编写并编译。
首先在Keil软件下新建基于LPC11C24的工程,并配置FLASH和SRMA的起始地址和大小。具体如表2所示。
3.5启动程序与应用程序之前的跳转
在启动程序中定义应用程序的地址,#defineAPP_CODE_ADDR (0x00001000),程序跳转的代码采用汇编语言编写,代码实例如下:
-
TC275HSM能支持SecOC中的密钥刷新机制吗?2024-02-21 0
-
CAN 总线错误检测机制#can总线北汇信息POLELINK 2023-05-26
-
CAN总线的位定时与同步机制#汽车CAN总线北汇信息POLELINK 2023-07-17
-
CAN总线访问与仲裁机制#汽车CAN总线北汇信息POLELINK 2023-10-20
-
基于CAN总线的在线更新机制该怎么设计?2019-09-29 0
-
求大神分享一种基于bootloader的嵌入式软件自动更新机制2021-04-27 0
-
CAN总线学习①-总线仲裁机制 精选资料分享2021-08-20 0
-
Android系统固件更新机制设计资料分享2021-12-20 0
-
can总线的可靠通信是依靠什么机制来实现的?2023-05-09 0
-
Linux系统下CAN总线通信的设计及实现2009-08-04 755
-
一种基于嵌入式系统的远程程序更新机制2009-08-26 471
-
ADO_NET数据集更新机制及并发控制策略2010-01-01 527
-
嵌入式系统自更新机制的设计与应用2009-03-29 775
-
适用动态存储的自适应刷新机制算法设计2018-04-03 542
-
分层式三维室内地图分类方法及更新机制2021-03-17 568
全部0条评论

快来发表一下你的评论吧 !
