

高压平流泵控制系统的设计与实现
工业控制
描述
1前言
1.1高压平流泵控制现状
高压平流泵是利用电机驱动柱塞泵,使液体以稳定的流量及压力输出的一种设备,作为分析仪器的动力源,广泛应用于石油、化工、食品、制药、煤炭、环保等工业领域。其主要技术要求:压力范围0~42MPa,流量范围0.001~9.999mL流量误差小于0.5%,从技术参数可知,如此小流量、高精度、高压力的流量计较难制造。平流泵又称恒流泵,要求流速恒定。平流泵流量的设定,实质上就是改变电机的转速,所以恒流效果如何主要取决于电机速度的稳定性。
目前,国内生产的恒流泵大多为步进电机驱动。这种泵成本低,调试方便,但致命弱点是在低流量下有较大脉动,很难保证恒流效果。这是因为步进电机是按照一定拍节和相序运行。为了解决这一问题,可借鉴国外仪器,使用直流电机取代步进电机,使恒流泵的性能大为提高[1]。直流电机具有良好的线性调速特性,简单的控制性能,高的效率,优异的动态特性,特别适用于要求调速的系统。
现在市场上通用的电机控制器大多采用单片机和DSP。但是传统单片机的数据处理能力有限,对采用复杂的反馈控制的系统,由于需要处理的数据量大,实时性和精度要求高,往往不能满足设计要求。近年来出现了各种高速SOC单片机,其性能得到很大提高,价格却比DSP低很多。其相关软件和开发工具越来越多,功能也越来越强,但价格却在不断降低。现在越来越多的厂家开始采用SOC单片机来提高产品性价比[2]。
1.2本文主要内容
系统采用PWM技术闭环调节直流电机转速,从而精确控制平流泵流量。
系统对高压平流泵精度要求非常高,流量精度要求小于0.5%。如此高精度需要有高性能控制器来采集调节直流电机转速,PIC32MX460F512L可很好满足要求,它采样直流电机转速,经过分析处理,发送适当占空比的PWM信号给电机,从而精确控制直流电机转速。为提高系统稳定性,电机驱动采用电机专用驱动芯片LMD18200。
系统提供压力、电流和热报警三重保护,以防平流泵损坏。压力和电流采用PIC32MX460F512L提供的A/D模块采样,精度高达10位[8]。
为便于人机交互和调试系统,系统提供了稳定可靠的通信功能,通信部分采用光耦隔离,提供RS232通信方式。
2相关技术和原理
2.1 直流电机控制方法
在各类机电系统中,由于直流电机具有良好的启动、制动和调速性能,直流电机调速系统已广泛运用于工业、航天领域的各个方面。随着半导体技术的进步,电力电子技术飞速发展,使直流电机的传动技术得到改进,以往普遍采用的三种基本调速方法,即:(1) 改变电枢回路总电阻;(2)改变电枢的供电电压;(3) 改变励磁磁通,发展为晶闸管相控整流电机调压系统,以及全波不控整流——PWM轧波直流电机调压调速系统[3]。直流电机脉宽调制(PWM)直流调速具有调速精度高、响应速度快、调速范围宽和耗损低等特点,使之成为直流电机应用的主要调速方式。
2.2 PWM直流调速原理
PWM控制是对脉冲的宽度进行调制的技术,即通过对一系列脉冲的宽度进行调解,来有效地获得所需要的波形。基于PWM控制的调速电路把流电压“轧”成一系列脉冲,通过改变脉冲的占空比来获得所需的输出电压。在PWM驱动控制的调速系统中,通过改变电机电枢电压接通时间与通电周期的比值(即占空比)来控制电机的转速。用脉宽调制的方法,把恒定的直流电源电压调制成频率一定宽度可变的脉冲电压序列,从而改变平均输出电压的大小,以调节电机转速。可见,在直流电压下,当调制脉冲频率一定时,脉冲宽度与占空比成线性关系。
在脉冲作用下,按一个固定的频率来接通和断开电源,就能够实时控制电机的运转速度。当电机通电时速度增加;电机断电时速度减小。设电机直接接通电源时(即占空比为100%),电机的转速为Vm,设占空比为D=t/T,则电机的平均速度为
(2-1)
式中:Ve——平均速度;Vm——全速(即直接通电时的速度);D=t/T——占空比(0-100%)。
由式(2-1)可见,Vm是直流电机直接通电时的速度(全速),只跟电机本身的特性相关,电机一定时,Vm为一个定值。改变占空比D=t/T,就能得到不同的平均速度,从而就能够对电机转速进行实时控制[4]。严格地讲,平均速度与占空比D并不是严格的线性关系,在一般的应用中,可将其近似看成线性关系。
2.3 H桥型电机驱动原理
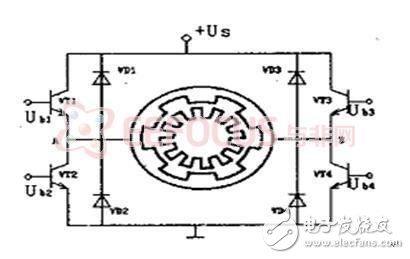
图2-1 H桥PWM驱动
常见的PWM驱动系统的主电路(功率放大器)结构有:H型和T型。这里以H型结构为例说明PWM双极式驱动的电路工作原理。
H桥PWM驱动如图2-1,图中VD1、VD2、VD3、VD4为续流二极管,用来保护VT1、VT2、VT3、VT4三极管,Ub1=Ub4=-Ub2=-Ub3。
当Ub1=Ub4为正时,VT1和VT4导通,VT2和VT3截止,UAB=Us。
当Ub2=Ub3为正时,VT1和VT4截止,VT2和VT3不能立即导通,因为电机的反电势使AB存在续流,续流流经VD3和VD2,保护了四个三极管,若续流在这个过程没有得到很大衰减,而Ub1=Ub4为正的阶段已经来临,则VT2和VT3一直不能导通;若续流在这个过程中得到很大衰减,则VT2和VT3导通,UAB=-Us。
显然,Ub1=Ub4为正的时间和Ub2=Ub3为正的时间相同时,UAB的平均电压为0,电机动态静止;当Ub1=Ub4为正的时间长于Ub2=Ub3为正的时间时,UAB的平均电压>0,电机正转,UAB的值越大,转速越高;当Ub1=Ub4为正的时间短于Ub2=Ub3为正的时间时,UAB的平均电压<0,电机反转,UAB的值越小,转速越高。
可见,只要控制Ub1、Ub2、Ub3、Ub4的脉冲宽度,就可控制直流电机的转向和速度,且可以达到动态静止,有利于正反转死区电压的消除[3]。
- 相关推荐
- 电机
-
医用输注泵控制系统设计2024-02-18 0
-
计量泵控制系统的设计2011-03-07 0
-
基于单片机的智能气动泵控制系统的设计(图2012-01-06 0
-
水泵无线自动控制系统2013-03-09 0
-
无线水塔自动控制系统2014-04-25 0
-
最小拍控制系统及直流电机闭环调速控制系统设计和实现2021-09-07 0
-
高压电机控制系统设计需要考虑哪些因素?2021-11-09 0
-
功率变送器在造纸磨浆机控制系统中的应用2022-01-20 0
-
如何实现中断控制系统的设计?2022-02-17 0
-
高压平面MOS2022-07-13 0
-
水厂高压控制室模拟屏控制系统的设计2009-06-03 533
-
风压平衡器自动控制系统的设计与实现2009-06-22 682
-
PLC在高压磨控制系统中的应用2009-12-30 707
-
电致生物效应高压脉冲源控制系统设计2011-02-12 662
-
高电压平台是什么设备2024-01-11 324
全部0条评论

快来发表一下你的评论吧 !
