

伺服电机电子齿轮比计算方法
伺服与控制
描述
伺服电机电子齿轮比就是对伺服接受到上位机的脉冲频率进行放大或者缩小,其中一个参数为分子,一个为分母。如分子大于分母就是放大,如分子小于分母就是缩小。例如:上位机输入频率100HZ,电子齿轮比分子设为1,分母设为2,那么伺服实际运行速度按照50HZ的脉冲来进行。上位机输入频率100HZ,电子齿轮比分子设为2,分母设为1,那么伺服实际运行速度按照200HZ的脉冲来进行。电子齿轮比是相对机械齿轮啮合,齿轮副的齿数比来说的。 也是目前常说的无轴传动的一种形式。
电子齿轮比的作用
以带17位编码器的电机为例,伺服电机每旋转一周,伺服放大器要给伺服电机传送131072个脉冲,同时编码器反馈131072个脉冲给伺服放大器。假如我们想让电机以20r/s的速度旋转时,如果不设置电子齿轮比,我们要给伺服放大器每秒发送2621440个脉冲,也就是脉冲频率为2621440HZ。但我们用的PLC等发送脉冲的器件,都有发送脉冲频率的限制,一般为200KHZ或500KHZ。这时我们引入电子齿轮的概念,就可以减小给伺服放大器发脉冲的频率。
伺服电机电子齿轮比计算方法
电机编码器的分辨率
伺服电机的编码器一般为2000线或者是2500线,也就是转一圈能产生2000或者2500个脉冲,而伺服驱动器对此脉冲进行4倍频处理,所以电机转一圈就能产生8000或者10000个脉冲,也就是分辨率为8000或者10000。
电机型号
编码器线数
电机编码器的分辨率
三洋P2、P5电机
2000
8000
大豪伺服
2500
10000
以三洋伺服电机为例:当控制器给驱动器发送一个脉冲时,伺服电机转过的角度为
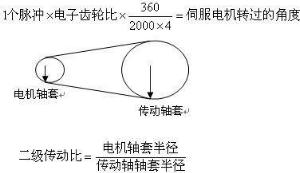
经过二级传动装置后,框架运动的角度折算到电机上角度和二级传动比是成反比的,比如二级传动比为1/4,那么电机转过的角度就是传动轴转过的4倍。 框架齿轮大小:
目前市场上主要有两种齿轮:绣框移动0.1mm时所需转过的角度为0.36°和0.45°。大部分机器都是采用0.36°的齿轮。
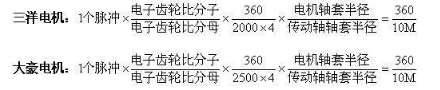
综上所述可以得知电子齿轮比的公式如下

采用丝杆结构的话,电子齿轮比的计算方式稍微有些不同
因为一般的,电机和丝杆轴之间是1:1的皮带传动,丝杆的螺距为M毫米/圈,那么计算公式为
伺服电机电子齿轮比的设置
以电机最高转速为目的的设置
伺服电机旋转时,速度表现重于精度表现时候,希望将电机速度性能完全表现出来;而对于旋转分辨率要求较低的时。建议采用下列方法设置
1)条件以及要求,
假设欲设置的伺服电机旋转速度为3000R/min,编码器每圈脉冲数为8192pulse/rev
2)计算说明
相对于3000R/min转速脉冲频率为8192×3000/60=409 600HZ=409.6KHZ
当控制器脉冲输出最高只能为100kHZ 时,先将电子齿轮比的分子部分CMX和分母部分CDV均设置为1,再将由控制器JOG旋转送出10KHZ脉冲,作为最高转速1/10的脉冲频率,此时伺服电机速度为
(10/409.6)×3000≈73R/min
如果未计算转速,可以直接监视驱动器转速值,也应为73R/min.
3)设置方法
10KHZ脉冲希望转速应为3000/min,但是实际为73r/min.为修正实际转速到300r/min.必须修改电子齿轮比。
73×CMZ/CDV=300(R/MIN)
因此,CMX 分子可设置为300,CDV 分母可以设置为73.
控制器的脉冲输出频率为100KHZs 时的转速为
3000×[﹙300/73﹚×100000] /409600=3009R/MIN
本实例中忽略了所有的结构条件,而实际应用中必须考虑传动部分的分辨率,如果忽略分变率最终导致产品无法使用。
以机械机构分辨率为目的的电子齿轮比的设置
伺服电机普遍应用于加工控制及操作中,此时加工精度要求应优先于速度给进。当精度达到后在考虑速度问题。因此电子齿轮比的设置必须优先考虑控制器的输出脉冲不可以任意放大,因输出脉冲频率将影响分辨率。建议优先考虑进行电子齿轮比的设置。
1)t条件及要求
假设欲设置的伺服电机额定转速为3000R/MIN 编码器每圈脉冲为8192pulse /rev ;控制器脉冲输出最高频率为100KHZ;伺服电机链接减速机构,输入脉冲:输出脉冲=M:N=3;减速机构输出轴链接机构导程为10mm的滚珠丝,
2)计算说明
伺服电机经减速机构驱动工作台的分辨率为
﹙10/8192﹚×﹙1/3﹚≈0.0004069(mm/pulse)=0.4069μm/pulse
丝杠每转一圈的脉冲数为
10/0.0004069≈24576(pulse/rev)
若希望控制器的输出分变率为1μm/pulse,则丝杠每转一圈的脉冲数变为10/0.001=10000pulse/rev
10000×﹙CMX/CMD)=24576pulse/rev
控制器送出脉冲 伺服接受脉冲
因此CMX分子可以设置为24576 ,CDV 分母可以设置为10000,以此类推算出伺服电机最高转速为
﹙100000×24576×60﹚/﹙8192×10000﹚=1800r/min
1800r/min《3000r/min 。故电机旋转速度无法达到3000r/min,但是伺服电机的分辨率将达到预期效果。
- 相关推荐
- 热点推荐
- �
-
松下伺服电机电子齿轮比怎么设置2024-09-07 3792
-
伺服电机频率如何计算_伺服电机频率响应2023-03-07 10934
-
伺服电机电子齿轮比怎么设置?2021-09-28 5005
-
步进电机选型的计算方法有哪些?2021-07-08 1409
-
伺服电机的选型计算方法相关资料分享2021-06-28 1726
-
一文知道伺服驱动器电子齿轮比的设置方法2021-03-14 32987
-
电机转子运动惯量的计算方法哪些2021-02-02 2212
-
伺服电机电子齿轮参数计算公式表资料免费下载2018-12-04 1654
-
一文知道伺服电机的选型计算方法2018-07-11 36107
-
根据电机额定转速计算电机额定转速时电子齿轮比、脉冲当量2018-03-14 14490
-
伺服电机负载惯量比计算方法以及影响2018-02-05 62127
-
伺服电机的选型计算方法2016-05-19 1213
全部0条评论

快来发表一下你的评论吧 !
