

基于恒流型(CC)电子负载的控制电路设计
工业控制
描述
在测量AC-DC和DC-DC电源、功率器件、电池、电池充电器等输出能量或消耗能量时都需要负载,传统的方法是利用固定电阻和可变电阻器来充当被测负载。一种新兴的电子仪器和测试设备---电子负载应运而生,他利用功率器件模拟电阻器,具有很强的操作灵活性。目前,电子负载技术发展的比较成熟,就其类型来说,一般有具有定电流( CC)、定电阻( CR)、定电压( CV)、定功率( CP)等工作模式。研究和开发新型的低成本的电子负载也成为一项有意义的工作。
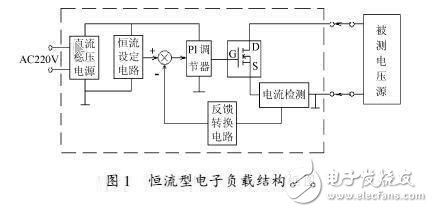
1 恒流型(CC)电子负载结构框图介绍
恒流型( CC)电子负载是用来测试电压源的多种性能的专门设备。本文介绍一款恒流型电子负载的新方案,他基于反馈控制理论,采用模拟PI调解器,控制N沟道大功率 MOSFETDE的导通强度,实现对被测电流的无静差控制。其控制精度高,电路简单,成本低廉。图1为恒流型电子负载的结构框图。直流稳压电源框是一款直 流稳压电源电路,他提供恒流设定电压、PI调节器工作电压、电流检测和转换电路的工作电源,要求必须具有的功率输出和较高的电压稳定指标。恒流设定电路可 提供线性的可调负极性电压输出。PI调节器由普通的运算放大器构成, PI参数用实验的方法调为最佳。执行机构为N沟道MOS管或MOS管组。
2 控制电路设计及实验研究
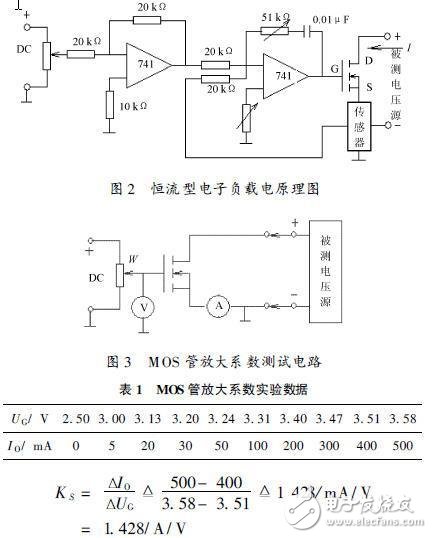
要实现一个无静差调节控制,就必须采用比例积分)微分控制规律。对本控制对象,采用比例)积分( PI)控制就能满足要求。硬件电路如图2所示。电路主要由倒相器, PI调节器, MOS管和霍尔电流传感器组成。设计时一般从控制对象或执行单元进行。首先需要确定的是执行单元的传递函数,即MOS管的放大系数Ks的确定。
2.1 MOS管的放大系数KS的确定
测试电路如图3所示。被测电压源功率足够大,输出电流满足测试要求。调节给定电位器W,测取MOS 管G极电压UG和流过MOS管D-S极的电流IO得到一组实验数据记录在表1中,从表中可以看出,当UG≤2. 5 V时,MOS管不导通, IO= 0,称为死区。在UG》2. 5 V后, MOS管开始导通,当UG》 3. 3 V后,其关系呈线性变化。在线性段求取KS.
2.2 电流反馈系数β的确定
也就是霍尔电流传感器转换系数的确定。设计中用到的电流传感器为霍尔传感器,输入为电流,输出为电压,经测试确定霍尔系数K = 0. 8 V/ A,即当传感器的输入端电流为1 A时,输出端的电压为0.8V.β= K = 0. 8 V/A
2.3 PI调节器静态放大系数KP的确定
根据负反馈闭环控制原理有: K =βKP KS = 1 得:KP = 1/ βKS△0. 875V/A.根据此值,选取调节器输入、输出电阻值,以满足RF/RI = KP.
2.4 各电压极性的确定和控制原理简述
各电压极性一般是由后向前推得, MOS管的控制电压UG为正( + ) ,也就要求PI调节器的输出为正( + ) ,又考虑到霍尔电流传感器的输出始终为正( + ) ,为了构成负反馈控制,则PI调节器的给定电压应为负( - )。所以PI调节器采用负相输入,由前一级的倒相器将由电位器W产生的可调正电压变为可调的负电压,作为恒流设定值加在调节器的输入极,与由霍尔电流传感 器提供的电流反馈电压进行比较,根据偏差量和正负极性由PI调节器实现比例积分调节,以实现电流( I O )恒定。改变积分电容的大小,以满足响应快速性和稳定性要求。
3 实验研究结果
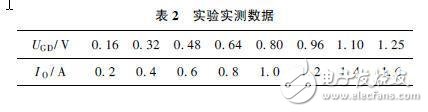
表2是实验实测数据,从数据规律看, UGD (电位器W)和MOS管漏、源极电流IO成较好的线性关系。且IO / UGD= 1/ β= 1/ 0. 8= 1. 25.实验中的调节响应的快速性和抗扰性能都能调为最佳。
4 几点说明和改进措施
(1)由于采用了PI调节器, MOS管的死区不必专门设计电路来消除, MOS管的非线性在闭环内自行消除。
(2)根据被测设备的性质(阻性,感性,容性) ,总可以通过调节PI参数,以保证其快速性,稳定性和抗扰性要求。
(3)该系统具有很强的可扩展性能。可实现数字给定和调节控制。
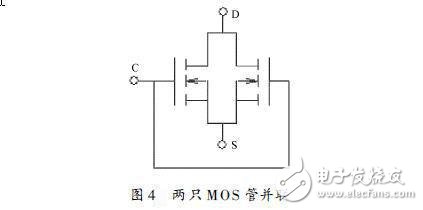
(4)对于要求测试电流较大时,可以考虑用多只MOS管的并联组合来扩大负载容量,如图4所示为2只MOS管的并联组合,在此情形下,K`S= mKS; K`P = KP/m,m为所并MOS管的个数。
(5)当扩容后,需要考虑增加MOS管驱动电路。
(6)此电路中没有耗能元件,所有的负载功率消耗仅由环路内元件承担,主要是MOS管自耗。受MOS管自身的功耗性能限制,允许流过的电流不可能太大,即使采用并联电路等扩容措施。所以正常使用时要充分考虑MOS管的散热。
-
电子负载、电子负载机、电子负载仪的原理2012-11-14 0
-
基于TMS320F28335的恒流型馈能式电子负载的设计2013-02-20 0
-
LED电源老化测试用的缓启动恒流电子负载2018-09-26 0
-
基于51单片机的新型智能电子负载2018-09-26 0
-
电子负载的工作原理2018-10-22 0
-
维修电源电子负载2021-09-25 0
-
电子负载选购小妙招!电子负载能应用在哪里?2022-10-18 0
-
电子负载解释2010-09-30 2021
-
介绍电子负载如何实现CV、CC或CR工作模式2018-01-30 62663
-
大功率电子负载电路图大全(四款大功率电子负载电路原理图详解)2018-03-06 64723
-
恒流电子负载电路图大全(五款恒流电子负载电路原理图详解)2018-03-06 85092
-
恒流型电子负载的电路图2020-04-11 5384
-
基于TMS320F28335的恒流型馈能式电子负载的设计2023-10-24 94
-
电子负载是什么?为什么会需要电子负载?2023-11-16 706
-
CC工作模式下电子负载运用2024-03-04 185
全部0条评论

快来发表一下你的评论吧 !
