

微观世界里的特种兵藻类细胞机器人
描述
现实世界中,在微观领域进行探索和操作需要一类小的机器人作为帮手,它们的尺寸要小到能够在微米甚至是纳米尺度执行特定任务,这就是微型机器人。微型机器人由于个体太小,在研制过程中主要面临3个方面挑战:能源、驱动和控制。针对这些问题,国内外已开展了几类微型机器人的研究,包括磁驱动微型机器人、光驱动微型机器人、热驱动机器人、化学气泡推动机器人、微生物机器人等。藻类细胞机器人是这些机器人中的一种。
藻类细胞尺寸通常为几微米至几十微米,具有眼点和鞭毛,能够从周围液体环境中获取能量驱动自身向前游动。它们的游动速度可达110 μm/s,即每秒运动距离是其自身体长的3~10倍。在它身体前端的“眼点”,能够感知特定波长光线的刺激,并迅速做出响应,这就是它的趋光性。藻类细胞得天独厚的优势自然而然地解决了微型机器人面临的供能和驱动问题。
藻类细胞在水中是任意游动的,如何实现其机器人化运动及向外界做功是生物学与机器人学交叉领域的难点问题。2005年,Weibel等首次报道了利用衣藻细胞趋光性控制细胞在微流控管道内往复运动,并通过衣藻细胞带动直径1~6 μm的聚苯乙烯小球运动,但该研究中衣藻细胞是在一段直管道内往复运动。为了控制藻类细胞进行更复杂的运动,中国科学院沈阳自动化研究所微纳米课题组开发了藻类细胞引导系统(Algae Guiding System, AGS)。通过该系统可以控制藻类细胞定向运动,使其依次通过十字形微流控管道,遍历4条管道后又回到出发点,如图1所示。通过合理规划AGS光源的运动,可实现藻类细胞机器人在二维空间沿任意设定路径的运动,包括沿三角形、长方形、方波形等路径运动。
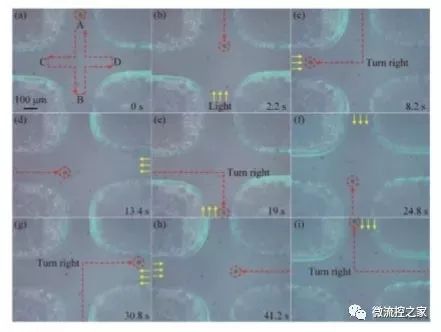
图1 藻类细胞机器人在微流控管道十字路口“右转”运动
在控制藻类细胞机器人定向运动的基础上,通过对机器人的群体控制,研究人员又成功实现了对微小物体的准确抓取、可控输运和精准释放。通过照射光斑可以控制藻类细胞机器人聚集到直径 100 μm颗粒周围,在移动光斑时藻类细胞群体可推动颗粒随着光斑而运动,关闭光斑即实现了颗粒的释放。
除了控制藻类细胞机器人定向运动,研究人员进一步实现了藻类细胞机器人的阵列化旋转。结合光诱导介电泳技术(ODEP),建立了藻类细胞在ODEP微环境中的转动状态模型和受力模型,实现了对藻类细胞的快速捕获及阵列化旋转,且通过改变光强可有效调节细胞旋转速度,如图2。构建的藻类细胞旋转阵列有望作为微尺度马达阵列,在微流控及生物驱动领域发挥重要作用。
图2 藻类细胞定向旋转阵列
藻类细胞作为微型机器人,解决了以往微型机器人在能源、驱动、控制方面遇到的问题。通过对藻类细胞机器人进行控制,研究人员实现了藻类细胞机器人的定向运动、旋转及对微结构的输运。藻类细胞机器人作为一种新型微型机器人,是微观世界里的特种兵,它们将在生物驱动、药物输运、环境监测和微纳制造等方面为人类做出贡献。
- 相关推荐
- 机器人
-
什么是工业机器人2015-01-19 0
-
敢对你Say NO的机器人,怕吗?2015-12-09 0
-
机器人与未来2015-12-29 0
-
震惊!模块细胞机器人!最接近人类的机器人!2016-01-22 0
-
全球机器人发展现状2016-01-28 0
-
PC电源,秀一秀朋友特种兵的风采2016-03-26 0
-
上周在帝都召开了一场世界机器人大会,原来的机器人都长这样的!2016-10-24 0
-
人工智能机器人大战即将开启,机器人世界主导,机器人是否能赋予如人类一般的情感。2016-11-22 0
-
核工业机器人特点及现状简述2017-08-07 0
-
机器人VS人:替代还是协作?2018-09-20 0
-
机器人是通过什么技术感知外部世界2020-08-05 0
-
传感器解决机器人发展的常见问题2020-08-14 0
-
机器人与编程的区别2021-09-01 0
-
如何实现拥有强悍功能智能巡检机器人2023-04-12 0
-
特种机器人的概念是什么_特种机器人有哪些2020-03-21 6319
全部0条评论

快来发表一下你的评论吧 !
