

增量式pid参数调整公式及策略
电子说
描述
PID算法是工程控制领域常用的一种算法,其有着技术成熟,不需要建立数学模型,参数整定灵活,适用性强,鲁棒性强,控制效果好等优点,得到了广泛的应用,其参数整定对控制效果影响极大,针对增量式的PID的参数整定方法在现有的文献中较少涉及。
PID分位置式PID和增量式PID两种,由于位置式PID控制的输出与整个过去的状态有关,用到了误差的累加值;而增量式PID的输出只与当前状态和前两状态的误差有关,因此位置式PID控制的累积误差相对更大,增量式PID输出的是控制量增量,如果微处理器出现故障,误动作影响较小,而执行机构本身有记忆功能,可仍保持原位,不会严重影响系统的工作,而位置式的输出直接对应对象的输出,对系统影响较大,因此实际中增量式PID应用更加广泛。
增量式PID控制
增量式PID控制,数字PID控制算法的一种基本形式,是通过对控制量的增量(本次控制量和上次控制量的差值)进行PID控制的一种控制算法。
增量式PID控制主要是通过求出增量,将原先的积分环节的累积作用进行了替换,避免积分环节占用大量计算性能和存储空间。
增量式PID控制的主要优点为:
①算式中不需要累加。控制增量Δu(k)的确定仅与最近3次的采样值有关,容易通过加权处理获得比较好的控制效果;
②计算机每次只输出控制增量,即对应执行机构位置的变化量,故机器发生故障时影响范围小、不会严重影响生产过程;
③手动—自动切换时冲击小。当控制从手动向自动切换时,可以作到无扰动切换。
由于增量式需要对控制量进行记忆,所以对于不带记忆装置的系统,只能使用位置式PID控制方式进行控制。
增量式pid参数调整公式
增量式PID控制根据位置式PID控制公式,写出n-1时刻的控制量:
设
得到
令 为积分系数; 为微分系数,可以将上式简化为
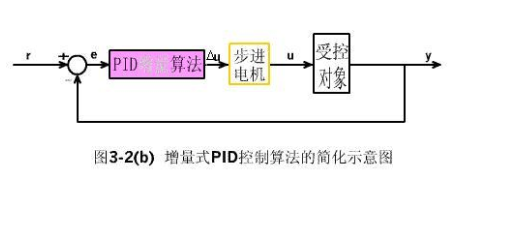
增量式PID控制算法
当执行机构需要的不是控制量的绝对值,而是控制量的增量(例如去驱动步进电动机)时,需要用PID的“增量算法”。
增量式PID控制算法可以通过(2-4)式推导出。由(2-4)可以得到控制器的第k-1个采样时刻的输出值为:
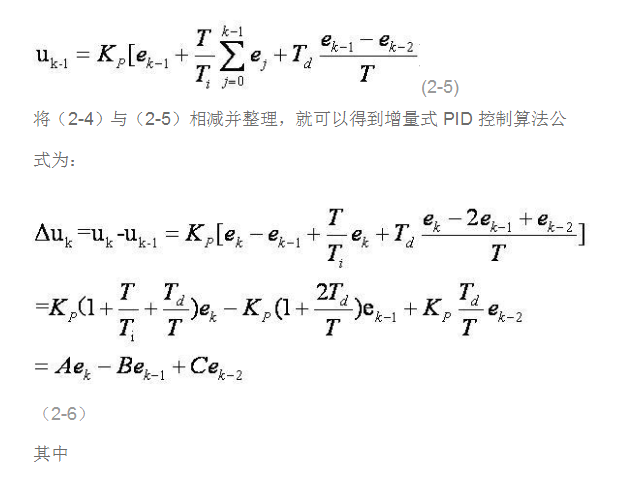
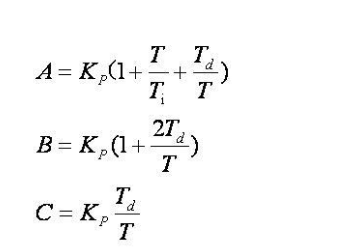
由(2-6)可以看出,如果计算机控制系统采用恒定的采样周期T,一旦确定A、B、C,只要使用前后三次测量的偏差值,就可以由(2-6)求出控制量。
增量式PID控制算法与位置式PID算法(2-4)相比,计算量小得多,因此在实际中得到广泛的应用。
位置式PID控制算法也可以通过增量式控制算法推出递推计算公式:
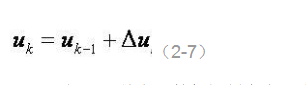
(2-7)就是目前在计算机控制中广泛应用的数字递推PID控制算法。
增量式PID控制算法C51程序
/*====================================================================================================
PID Function
The PID (比例、积分、微分) function is used in mainly
control applications. PIDCalc performs one iteration of the PID
algorithm.
While the PID function works, main is just a dummy program showing a typical usage.
=====================================================================================================*/
typedef struct PID
{
int SetPoint; //设定目标
Desired Value long SumError; //误差累计
double Proportion; //比例常数 Proportional Const
double Integral; //积分常数 Integral Const
double Derivative; //微分常数 Derivative Const
int LastError; //Error[-1]
int PrevError; //Error[-2]
} PID;
static PID sPID;
static PID *sptr = &sPID;
*=======================================================================
Initialize PID Structure PID参数初始化
=====================================================================================================*/
void IncPIDInit(void)
{
sptr-》SumError = 0;
sptr-》LastError = 0; //Error[-1]
sptr-》PrevError = 0; //Error[-2]
sptr-》Proportion = 0; //比例常数
Proportional Const sptr-》Integral = 0; //积分常数Integral Const
sptr-》Derivative = 0; //微分常数
Derivative Const sptr-》SetPoint = 0;
}
/*====================================================================================================
增量式PID计算部分
=====================================================================================================*/
int IncPIDCalc(int NextPoint)
{
register int iError, iIncpid; //当前误差
iError = sptr-》SetPoint - NextPoint; //增量计算
iIncpid = sptr-》Proportion * iError //E[k]项
- sptr-》Integral * sptr-》LastError //E[k-1]项
+ sptr-》Derivative * sptr-》PrevError; //E[k-2]项
//存储误差,用于下次计算
sptr-》PrevError = sptr-》LastError;
sptr-》LastError = iError;
//返回增量值
return(iIncpid);
}
结合上述公式探讨PID的普遍控制规律和常用参数整定方法
(一)先来讨论PID三个参数的控制规律
1. 比例调节规律(Kp):是按比例反应系统的偏差,系统一旦出现了偏差,比例调节立即产生调节作用用以减少偏差。
2. 积分调节规律(Ki):实质上就是对偏差累积进行控制,直至偏差为零。使系统消除稳态误差,提高无差度。
3. 微分调节规律(Kd):微分作用反映系统偏差信号的变化率,具有预见性,能预见偏差变化的趋势,因此能产生超前的控制作用,在偏差还没有形成之前,已被微分调节作用消除。
4. 比例积分微分控制规律PID:PID控制规律是一种较理想的控制规律,它在比例的基础上引入积分,可以消除余差,再加入微分作用,又能提高系统的稳定性。
(二)再来讨论PID参数整定的一般方法
1. 实验凑试法,整定步骤为“先比例,再积分,最后微分,这也是初接触PID的人常使用的。
2. 理论计算整定法。它主要是依据系统的数学模型,经过理论计算确定控制器参数。
3. 实验经验法,扩充临界比例度法,实验经验法调整PID参数的方法中较常用的是扩充临界比例度法,其最大的优点是,参数的整定不
依赖受控对象的数学模型,直接在现场整定、简单易行。
总之,对于PID的初用者,增量式的PID参数整定的时候,采用同位置式的比例Kp,积分Ki,微分Kd相同的系数,理解起来比较容易,整定自然就会符合以上所说的规律,可以达到预期的控制效果。
-
浅谈增量式PID参数整定2012-08-18 0
-
浅析位置式PID与增量式PID算法2016-01-15 0
-
位置式PID与增量式PID的区别在哪?2021-07-13 0
-
增量PID的原理及代码2021-09-03 0
-
在STM32如何去实现增量式PID算法2021-09-13 0
-
PID算法增量式算法2021-09-13 0
-
如何实现增量式PID2021-09-13 0
-
什么是增量式PID2021-09-13 0
-
增量式PID的stm32实现及其整定过程2021-09-13 0
-
增量式PID的公式介绍2021-09-13 0
-
什么是PID参数调整2022-01-20 0
-
位置式PID与增量式PID简介2022-01-20 0
-
位置式PID和增量式PID区别是什么?2023-10-26 0
-
请问如何调节增量式pid?2023-11-09 0
-
增量式pid分析及参数整定2017-11-24 15139
全部0条评论

快来发表一下你的评论吧 !
