

运用越来也广泛的扫地机器人
安全设备/系统
描述
近年来,随着计算机技术与人工智能科学的飞速发展,智能机器人技术逐渐成为现代机器人研究领域的热点。其中,服务机器人开辟了机器人应用的新领域。
随着人们生活水平的提高,健康、舒适的家居环境越来越被更多的人所关注。买房、装修成为人们茶余饭后谈论的热点话题,但装修后又脏又累的卫生清扫工作,成为困扰家庭主妇的又一大难题。对不少家庭而言,清洁机器人已成为清洁家庭的必备小家电。
自动进行房间地面清洁的自动扫地机器人,集机械学、电子技术、传感器技术、计算机技术、控制技术、机器人技术、人工智能等诸多学科为一体。自动扫地作为智能移动机器人实用化发展的先行者。
扫地机器人,又称自动打扫机、智能吸尘、机器人吸尘器等,是智能家用电器的一种,能凭借一定的人工智能,自动在房间内完成地板清理工作。一般采用刷扫和真空方式,将地面杂物先吸纳进入自身的垃圾收纳盒,从而完成地面清理的功能。本设计扫地机器人采用刷扫吸尘方式,机身为无线机器,以圆盘型为主,使用充电电池运作,操作方式使用遥控器、或是按机器上的操作面板相应按钮。本次设计的扫地机器人可设定时间预约打扫,自行充电。前方设置超声破测距传感器,可侦测障碍物,如碰到墙壁或其他障碍物,会自行转弯,从室内边沿开始走矩形路线,有规划清扫地区。
扫地机器人的工作原理及特点
扫地机器人由微电脑控制,可实现自动导航并对地面进行清扫和吸尘,通过碰撞头实现对前方障碍物的躲避和绕过可以使所到角落得到清洁,同时两个超大边扫轮的设计,可使角落和地面扫的更彻底,更干净,两个清扫轮的相对旋转,更使得垃圾不会从机体底部溜掉,清洁更完善,同时清扫吸尘一体的双重作用,使扫起来的尘土更有规律和顺畅的进入垃圾收集盒内,并且通过在前轮和清扫轮动力箱内上安装光电传感器,可以使该机器人拥有自动防机体卡死和扫轮卡死的功能,当被卡住使其自动后退或关机,并在碰撞头上装有红外反射探测器,可自动判断前方是否悬崖,并自动绕开。
特点:
1、扫地省时、省力、提高工作效率、能源利用率:整个清洁过程不需要人控制,减轻人的操作负担,人们可以利用节省的时间做其他有意义的事。
2、低噪音:小于50分贝,清洁房间的过程免受噪音之苦。
3、净化空气:内置活性碳、吸附空气中有害物质。
4、轻便小巧:轻松打扫普通吸尘器清理不到的死角。
扫地机器人的关键技术
扫地机器人系统通常由四个部分组成:移动机构、感知系统、控制系统和吸尘系统。
移动机构是扫地机器人的主体,决定了机器人的运动空间,一般采用轮式机构。
感知系统一般采用超声波测距仪、接触和接近觉传感器、红外线传感器和CCD摄像机等。
随着近年来计算机技术、人工智能技术、传感技术以及移动机器人技术的迅速发展,扫地机器人控制系统的研究和开发已具备了坚实的基础和良好的发展前景。扫地机器人的控制与工作环境往往是不确定的或多变的,因此必须兼顾安全可靠性、抗干扰性以及清洁度。用传感器探测环境、分析信号,以及通过适当的建模方法来理解环境,具有特别重要的意义。近年来对智能机器人的研究表明,对于工作在复杂非结构环境中的自主式移动机器人,要进一步提高其自动化程度,主要依靠模式识别及障碍物识别、实时数据传输及适当人工智能方法,还需要进一步开发全局模型,从而为机器人获取全局信息。
目前发展较快、对扫地机器人发展影响较大的关键技术是:传感技术、智能控制技术、路径规划技术、扫地技术、电源技术等。
扫地机器人的机械结构
扫地机器人主要包括以下几部分:
1、个行走驱动轮及驱动电机。该部分主要保证机器人能够在平面内移动。壳体前端和侧面装有红外开关,作为碰撞检测传感器。底面的3个红外开关作为台阶检测传感器,防止跌落。驱动轮上装有光电编码盘,可以对轮速进行检测和控制,实现定位和路径规划。同时还扩展了超声波传感器,用于精确定位的需要;
2、清扫机构。用电机带动两个清扫刷,使左面清扫刷顺时针转动,右面逆时针转动,这样就可以在清扫灰尘时将灰尘集中于吸风口处,为扫地机构的工作做准备;
3、扫地机构。制造强大的吸力,将灰尘吸入灰尘存储箱中;
4、擦地机构。在清扫、扫地之后,利用安装在壳体下面的清洁布擦除残留在 地面上的细小灰尘,保证清洁工作的质量。
扫地机器人的工作流程
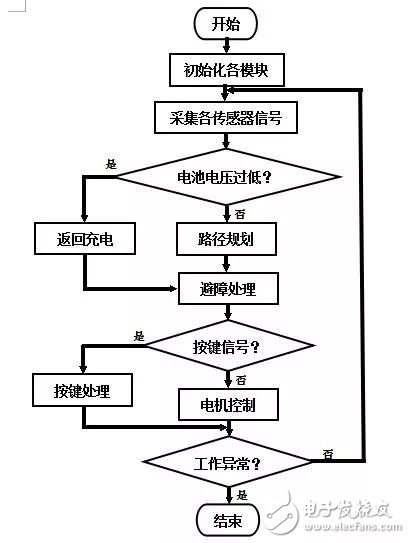
1、首先可以通过键盘或者遥控器启动清洁机器人,让它开始清扫工作。
2、机器人一旦开始工作,便控制清扫机构进行清扫、扫地机构开始扫地、擦地机构开始擦地。
3、机器人开始工作,传感探测模块就开始不断地采集外部信息,送到CPU进行分析和决策产生机器人行走的路径。
4、当路径规划需要机器人实现转向的时候。CPU就分别改变左右轮的速度,通过差速来实现转向。
5、工作期间机器人可以通过LCD显示一些相关信息(比如工作模式、工作计时或温度)。
6、遥控器除了可以控制清洁机器人的启停,还可以对机器人进行定时,让机器人在一定时间后开始工作或者工作一定时间后停止工作。
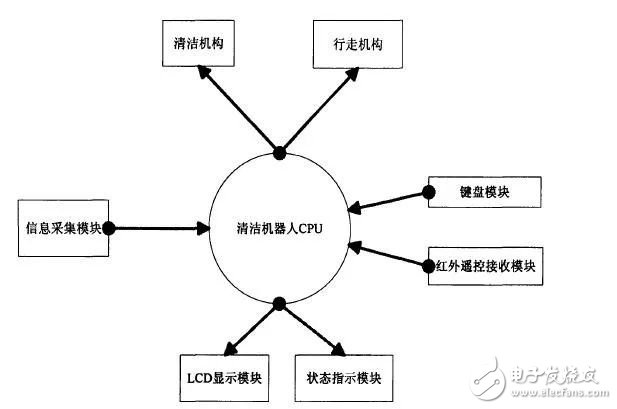
机器人利用安装的各类传感器来获取室内环境以及自身的基本信息,如障碍物的位置、自身走过的距离等;然后根据获得的信息,选定相应的控制策略;通过以单片机为核心的控制系统进行障碍物判断、避障策略选择和运动行走实施。机器人面板上有控制其开始/停止工作的按键。同时也可以通过遥控来控制,遥控还可以用来对机器人进行定时,LCD实时的显示定时的倒记时和当前的温度值。
扫地机器人传感器系统
任何机器人都离不开传感器,机器人要具备智能行为必须不断感知外界环境,从而做出相应的决策行为。
超声波传感器
超声波是一种一定频率范围的声波它具有在同种媒质中以恒定速率传播的特性,而在不同媒质的界面处,会产生反射现象利用这一特性,就可以根据测量发射波与反射波之间的时间间隔,从而达到测量距离的作用其具体的计算公式如下:
s=v×t/2
注:s:为障碍物与吸尘器之间的距离;
t:为发射到接收经历的时间;
v:为声波在空气中传播的速度
在扫地机器人中,避障功能的实现正是利用了这一超声波测距的原理它的传感器部分由三对(每对包括一个发射探头和一个接收探头)共六个超声波传感头组成
由单独的振荡电路产生频率固定为40kHz,幅值为5V的超声波信号在控制器送来的路选信号的作用下,40kHz的振荡信号被加在超声发射探头的两端,从而产生超声信号向外发射;该信号遇到障碍物时,产生反射波,当这一反射波被接收器接收后,根据前述测距的原理,就可以精确地判断障碍物的远近;同时,根据信号的幅值大小,也可以初步确定障碍物的大小。
超声波传感器采用直接反射式的检测模式。位于传感器前面的被检测物通过将发射的声波部分地发射回传感器的接收器,从而使传感器检测到被测物,经单片机系统处理判断前方物体的大小、远近及大体属性。
红外测距传感器
红外测距传感器利用红外信号遇到障碍物距离的不同反射的强度也不同的原理,进行障碍物远近的检测。红外测距传感器具有一对红外信号发射与接收二极管,发射管发射特定频率的红外信号,接收管接收这种频率的红外信号,当红外的检测方向遇到障碍物时,红外信号反射回来被接收管接收,经过处理之后,即可利用红外线的返回信号来识别周围环境的变化。
接触式传感器
接触式厚度传感器,通常采用电感式位移传感器、电容式位移传感器、电位器式位移传感器、霍耳式位移传感器等(见位移传感器)进行接触式厚度测量。为了连续测量移动着的物体的厚度,常在位移传感器的可动端头上安装滚动触头,以减少磨损。接触式厚度传感器可测量物体高度,空间大小。全能清洁机器人可利用这一点探测障碍物的高度,进一步做出判断发挥它的功能.
红外光电传感器
把浑浊度传感器的外壳固定在被测箱体内,采用一定波长的红外发光二极管作为检测光源,穿透被测溶液,检测其透射光强来检测溶液浑浊度的程度。红外发光二极管发射的红外光穿透被测溶液的介质,被接收端的光电三极管接受,产生光电流。由于溶液含有的介质、灰尘的颗粒大小、密度不同,光电三极管的光电流近似为线性变化。经滤波后输出,即得到与浑浊度相关的检测信号。
防碰撞传感器
因各种因素的影响,扫地机器人难免会有撞上障碍物的可能。为了处理这种情况,我们利用光电开关传感器来感应车体受到的碰撞,及碰撞的大概位置,以使扫地机器人做出相应的决策。
在扫地机器人的前端设计了约180°的碰撞板,在碰撞板左右两侧各装有一个光电开关。光电开关由一对红外发射对管组成。
-
扫地机器人十大排名!了解扫地机器人哪个牌子好2015-01-20 0
-
扫地机器人如何选购?2015-01-21 0
-
扫地机器人结构、工作原理和主要技术2015-02-05 0
-
扫地机器人方案2015-05-18 0
-
原来扫地机器人是这样工作的!2015-12-24 0
-
小米扫地机器人上手:家居能手2016-09-28 0
-
扫地机器人怎么制作2017-01-12 0
-
智能扫地机器人解决方案2017-05-27 0
-
扫地机器人原理用处这么多????????2017-12-09 0
-
如何选择好的扫地机器人2018-08-20 0
-
智能扫地机器人用什么马达2018-10-12 0
-
扫地机器人自动回充的技术原理是什么2021-09-14 0
-
服务型智能扫地机器人的主要功能有哪些呢2021-11-08 0
-
扫地机器人有哪些功能2022-02-07 0
-
电机驱动的扫地机器人介绍2022-11-09 0
全部0条评论

快来发表一下你的评论吧 !
