

PLC与步进电机的运动控制详解
电子说
1.2w人已加入
描述
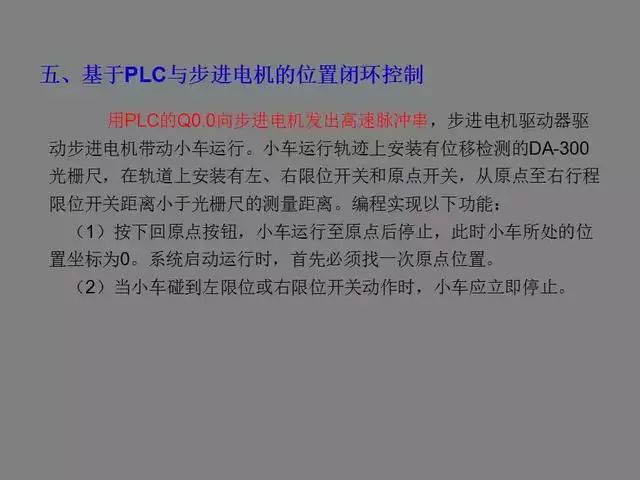
步进电机由于体积精巧、价格低廉、运行稳定,在低端行业应用广泛,步进电机运动控制实现全闭环,是工控行业的一大难题。
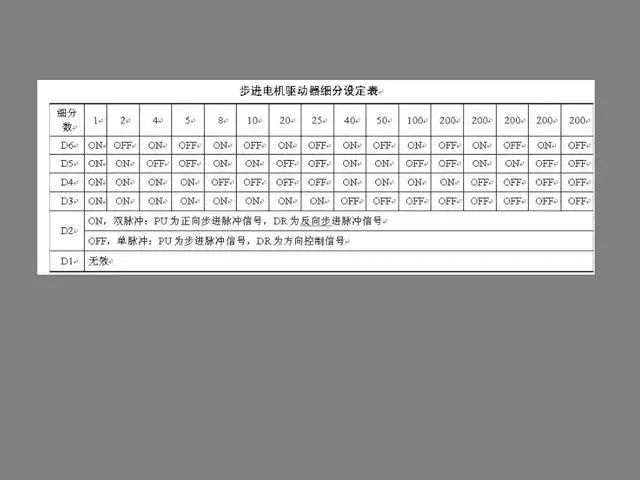
主要问题有两个,原点的不确定性和失步,目前,采用高速光电开关作为步进系统的原点,这个误差在毫米级,所以在精确控制领域,是不能接受的。另外,为了提高运行精度,步进电机系统的驱动采用多细分,有的大于16,假如用在往复运动过程中,误差大的惊人。已经不能适应加工领域。
为此,提出步进电机全闭环控制系统,以适应目前运动控制领域的需求。
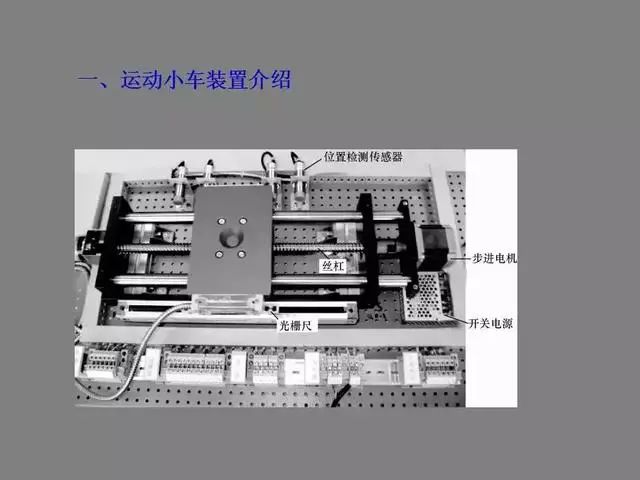
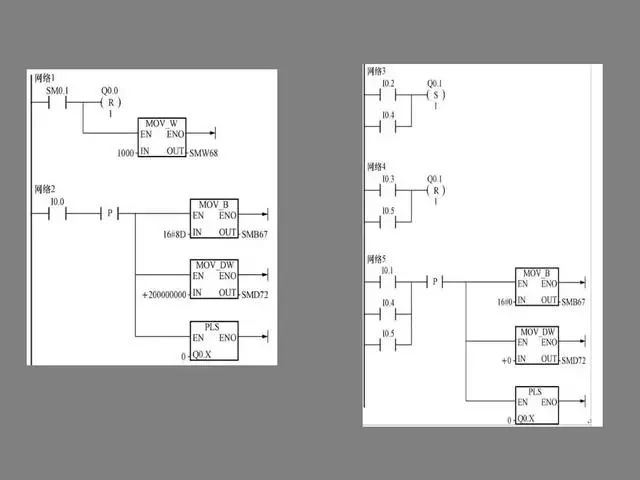
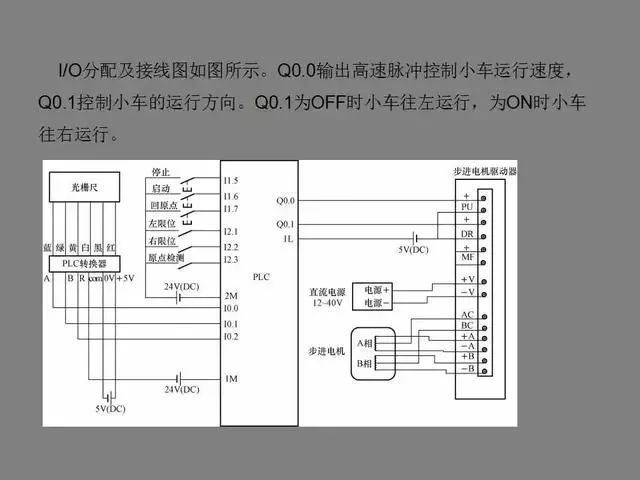
1、 硬件连接
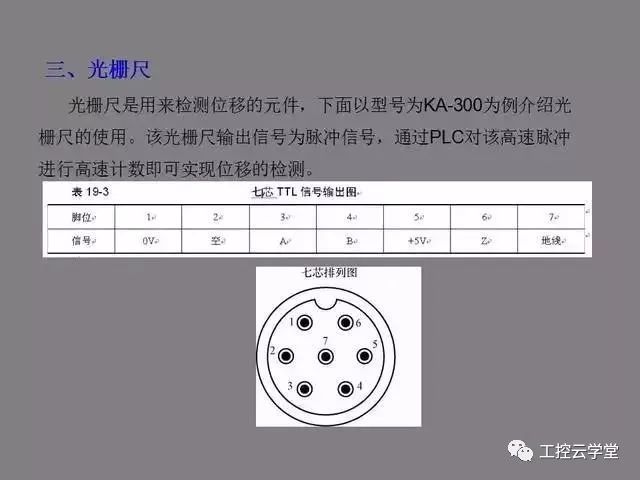
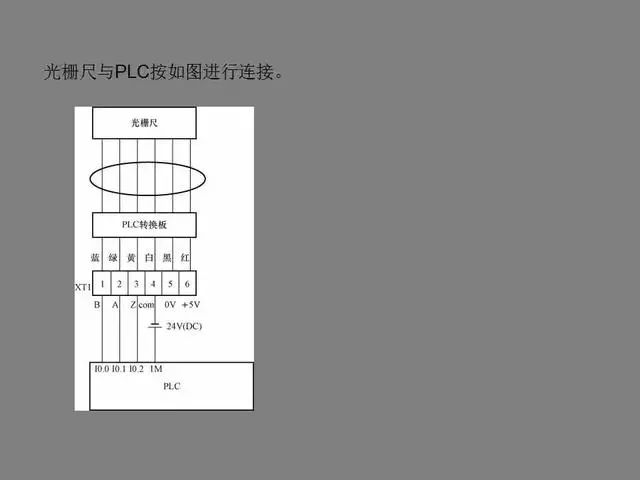
硬件连接加装编码器,根据细分要求,采用不同等级的解析度编码器进行实时反馈。
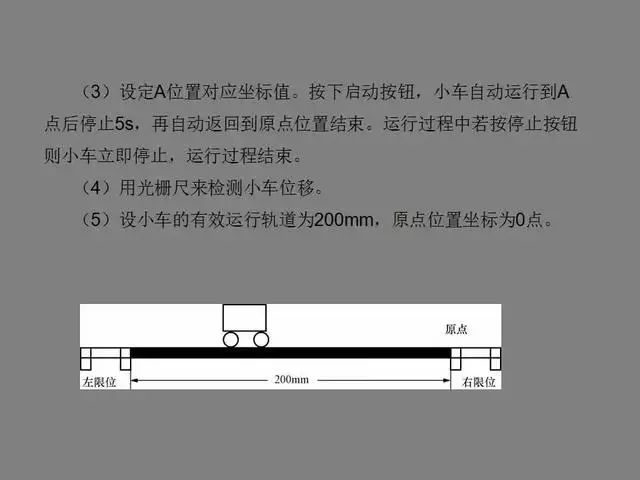
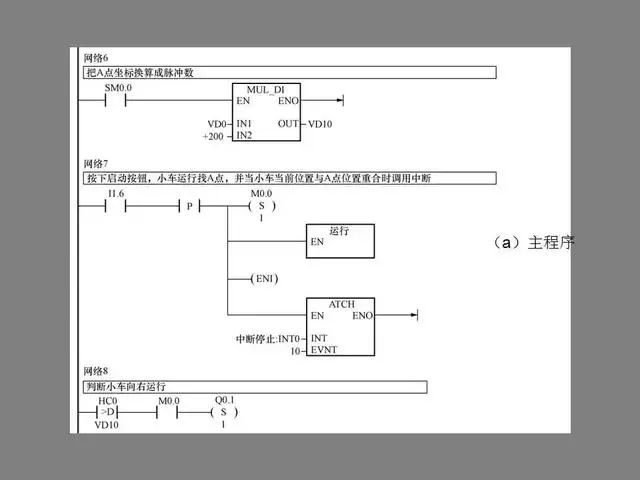
2、 原点控制
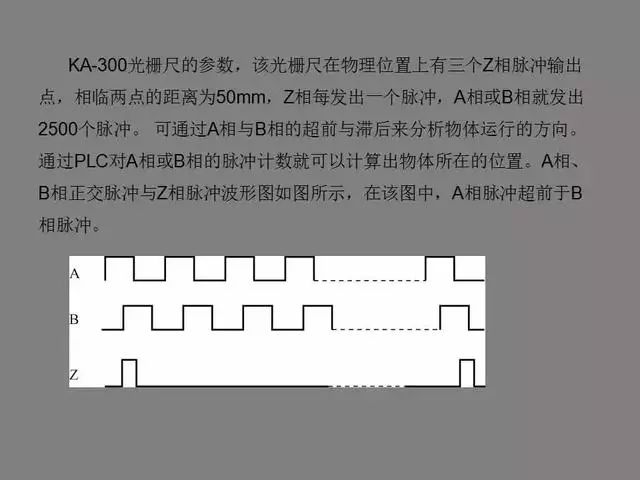
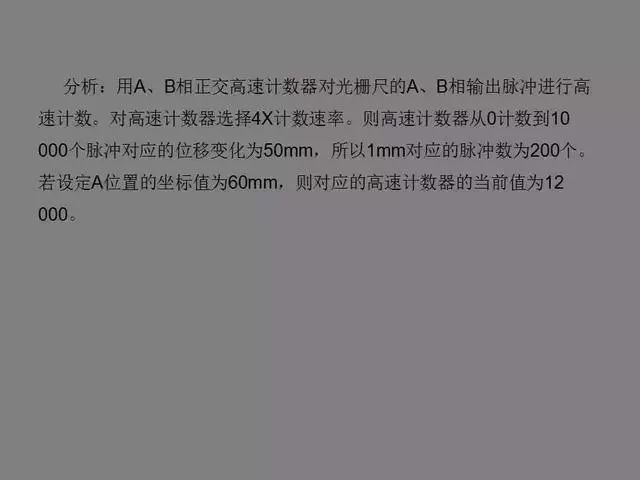
根据编码器的Z信号,识别、计算坐标原点,同数控系统相同,精度可以达到2/编码器解析度×4。
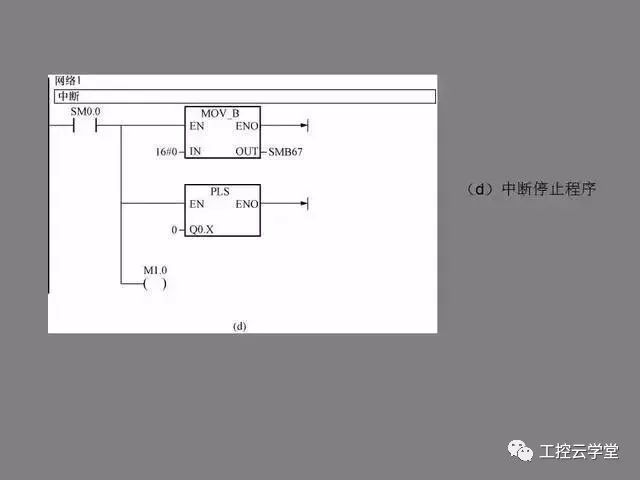
3、 失步控制
根据编码器的反馈数据,实时调整输出脉冲,根据失步调整程度,采取相应办法。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
plc如何去控制步进电机2021-06-29 0
-
plc控制步进电机程序2008-10-09 11991
-
步进电机的PLC直接控制2009-06-19 2849
-
plc控制步进电机直接控制2012-06-20 5538
-
多轴步进电机插补控制器及多轴步进电机运动控制卡控制方法pdf资料分享2018-04-11 1183
-
根据PLC的步进电机完成单双轴运动控制的设计2018-10-08 4627
-
S7-200、变频器与触摸屏的应用PLC与步进电机的运动控制实例说明2018-10-25 2411
-
使用PLC如何控制步进电机的速度与方向2020-02-16 20391
-
分析:plc是否能够控制步进电机2021-01-12 3473
-
步进电机运动控制策略2022-09-08 844
-
PLC控制步进电机逻辑思路2023-03-22 270
-
基于台达PLC的步进电机控制<续一>2023-03-23 179
-
plc如何控制步进电机的速度和方向?2023-08-02 762
-
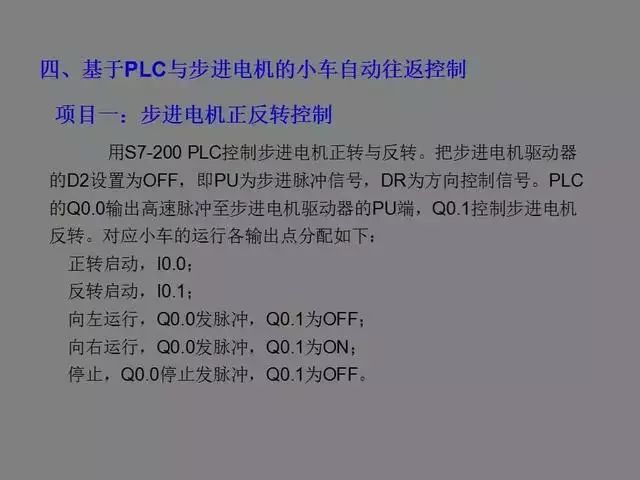
基于PLC S7-200与步进电机的运动控制2023-10-19 344
全部0条评论

快来发表一下你的评论吧 !
