

UPS控制技术:基于PID控制和重复控制的复合控制策略
电子说
描述
在计算机网络及其相关网络通信技术迅猛发展的推动下,为确保在进行信息资源共享时所获得的数据、文件和图形等资料具有高度的真实可靠性、连续性和高保真度UPS(不间断电源)正越来越广泛地被应用到国民经济的各个领域。同时,随着信息技术的发展,智能信息处理以及基于网络的远程监控等新技术逐步应用于UPS中,构成了全智能化的UPS系统,方便了用户、提高了可靠性。本文着重介绍UPS控制技术,分析了UPS的PID控制技术的特性并深入分析了基于PID控制和重复控制的复合控制策略。
控制策略概述
UPS逆变器的数字控制技术成为了当前逆变器研究领域的一个热点,出现了多种逆变器数字化控制方法,包括数字PID控制、状态反馈控制、无差拍控制、重复控制、模糊控制等,有力地推动了UPS技术的发展。
每一种控制方案都各有其长短。某些控制方法虽然具有较好的动态响应速度,但稳态输出电压谐波失真度又达不到要求;某些控制方法虽然同时具有较高的动态和稳态精度,但它对参数变化很敏感,鲁棒性不好;某些控制方法有很好的稳态精度,但动态响应效果却很差;某些控制方法受硬件水平的限制,目前还不能得到很好的应用。因此,一种必然的发展趋势是各种控制方案互相渗透,相互取长补短,构成复合的控制方案。
数字PID控制
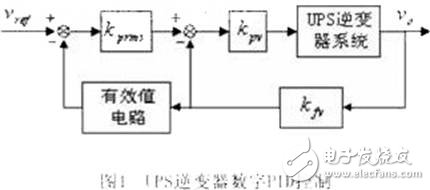
在UPS逆变器控制中,最常用、最简单的方法是PID控制,具体实现方式包括电压瞬时值反馈控制和电压电流双闭环反馈控制,图1所示为电压瞬时值反馈控制。
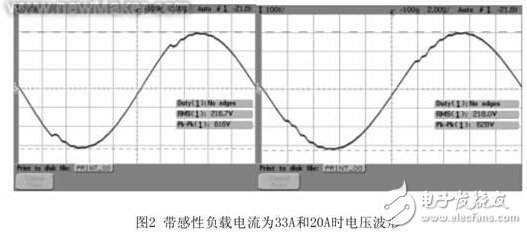
电压瞬时值反馈的控制策略优点是只使用了一个电压传感器,缺点是系统动态响应特性不好,跟踪特性不是很好, 波形质量欠佳。图2为采用此控制方法在10KVA逆变器上带容性负载时的输出电压波形。从图中可以看出波形失真度较大,难以满足高质量电源的要求。
改善电压源逆变器的动态特性的方法之一是增加一个电流闭环。在这种控制策略中,滤波电容的电流(也就是输出电压的微分)作为一个反馈变量引入到控制系统中,达到改善输出波形质量,它必须使用一个霍尔传感器来检测滤波电容电流,增加了系统的复杂性和成本。
基于PID控制和重复控制的复合控制
逆变器控制器是一个参考给定呈正弦变化的调节系统,而不是一个恒值给定的调节系统。同时,系统的扰动即负载电流,也不是一个恒值扰动,当接线性负载时,负载电流呈正弦变化;而当带非线性负载时,电流按非正弦规律变化。针对正弦指令的无静差跟踪问题,可以在控制器中植入一个与参考给定同频的正弦信号模型。
前馈控制的目的是改善数字PID控制器的控制效果,进一步减小动态过程中输出电压的波动和波形畸变,改善数字PID控制系统的稳定性。离散重复控制器,用来消除系统的周期性跟踪误差,减小UPS逆变器带非线性整流负载时的输出电压波形畸变。数字PID控制器,作用是对输出电压跟踪误差进行实时调整,减小系统受到干扰时的输出电压波动和畸变。控制框图如图3所示。图中主要环节介绍如下:
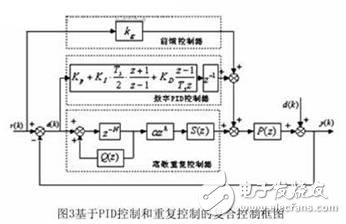
1)z-N :周期延迟环节,使本周期误差信息从下一周期开始影响矫正量。
2)Q(z) :为克服对象模型不精确,增强系统稳定性而设置的。可取一个小于1的常数。
3)S(z) :补偿环节,用于改造对象特性。
4)zk :相位补偿,满足系统频率响应要求。
5)a :比例因子。用来维持系统的稳定性。
实验结果
依照上述模型,用simulink仿真可初步确定控制器的参数,开始用较保守的参数在10KVA的逆变模块上试验.,调整参数使系统达到较好的静动态特性。系统参数为:输入直流电压为200V、输出频率50HZ、开关频率19.6HZ、滤波电感120uH、滤波电容15uF。图4左为带阻性负载,电流为36A时的电压电流波形;右为带整流性负载,电流为20A时的电压电流波形。
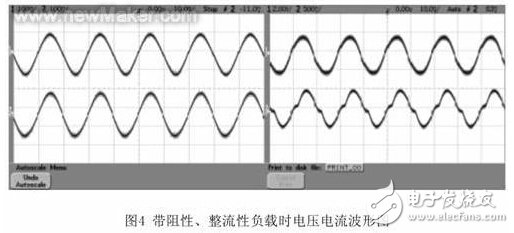
从以上两图可以看出,基于PID控制和重复控制的复合控制策略具有较好的波形控制效果,特别是对非线性整流负载具有很好的谐波抑制效果,同时系统还具有较好的动态响应特性。因此,本文介绍的基于PID控制和重复控制的复合控制策略具有较高的应用价值。
-
单相UPS逆变器重复控制与模糊PI控制相结合的控制策略2018-09-26 0
-
采用了PID控制器的闭环控制策略2021-08-23 0
-
燃烧控制系统GPC-PID串级控制策略2009-12-08 813
-
基于重复控制技术的光伏逆变器并网控制策略研究2010-08-20 1044
-
高频链逆变器的重复控制策略2010-12-24 734
-
基于重复控制的全数字UPS逆变器2009-07-09 1303
-
UPS逆变器的重复控制器参数的仿真分析2009-07-16 944
-
PID单相逆变器实现复合控制方案2011-08-04 4914
-
DSP实现UPS逆变器数字化复合控制系统2011-09-28 482
-
基于模糊-PID复合控制算法的电机转速控制2016-04-05 656
-
基于模糊_PID复合控制算法的电机转速控制2016-05-03 777
-
模糊控制与PID控制的对比及其复合控制_杨世勇2017-02-07 777
-
基于重复控制下的双变流器串/并联补偿式UPS2022-08-02 203
-
PID控制器与重复控制器的单相逆变器复合控制的设计2017-11-14 1010
-
模拟电路设计之PID控制策略2019-07-03 9354
全部0条评论

快来发表一下你的评论吧 !
