

手机摄像头组成结构与原理
描述
19世纪初夏普与当时的日本通信运营商J-PHONE发明了夏普 J-SH04,夏普 J-SH04具有拍照功能,2003年4月24日夏普发售了全球首款百万像素手机J-SH53,风靡一时。
随着技术的不断突破与革新,新型照相镜头如雨后春笋一样,不断出现,从最初的百万到现在的千万紧紧用了十余年的时间,拍摄质量不断进入新台阶。最具有代表的如华为、三星、苹果等公司,华为从p6开始镜头与处理芯片突飞猛进,新的设计理念不断应用于实践,比如在年前还是理论的双摄像头设计,目前已经被三星,华为掌握,纷纷用于最新上市手机。
目前市面上的手机通常都具有前后摄像头,前面一般在500万左右,用来自拍和视频通话,后置一般在1300万左右,可以照出更加清晰的图片和录制清晰视频。
手机摄像头组成结构
手机摄像头主要由以下几个部分组成:PCB板、DSP(CCD用)、传感器(SENSOR)、固定器(HOLDER)、镜头(LENS ASS′Y)。其中镜头(LENS ASS′Y), DSP(C,CD用),传感器(SENSOR)是最重要的三个部分。


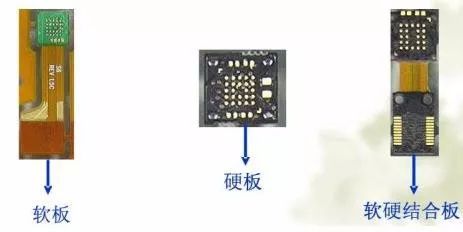
PCB板
PCB板又分为硬板,软板,软硬结合板三种(如下图),CMOS可用任何一种板,但CCD的话就只能用软硬结合板。这三种板中软硬结合板价格最高,而硬板价格最低。
镜头
镜头是仅次于CMOS芯片影响画质的第二要素,其组成是透镜结构,由几片透镜组成,一般可分为塑胶透镜(plastic)或玻璃透镜(glass)。当然,所谓塑胶透镜也非纯粹塑料,而是树脂镜片,当然其透光率感光性之类的光学指标是比不上镀膜镜片的。
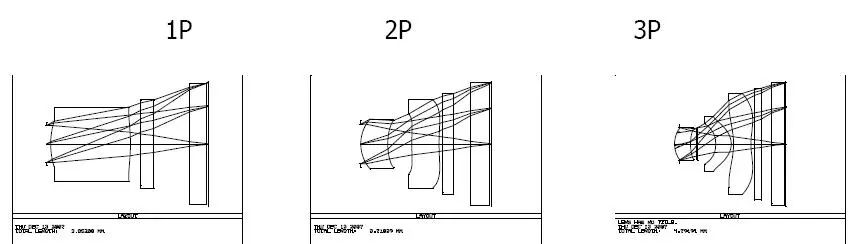
通常摄像头用的镜头构造有:
1P、2P、1G1P、1G2P、2G2P、2G3P、4G、5G等。透镜越多,成本越高,相对成像效果会更出色;而玻璃透镜又比树脂贵。因此一个品质好的摄像头应该是采用多层玻璃镜头!现在市场上的多数摄像头产品为了降低成本,一般会采用廉价的塑胶镜头或一玻一塑镜头(即:1P、2P、1G1P、1G2P等),对成像质量有很大影响!
镜头由透镜、滤光装置、镜筒三部分组成,镜头参数有三个,即焦距f′、相对孔径D/f′和视场角2ω。
镜头焦距是镜头的一个重要指标,决定了物和像的比例,如物在无限远,像的大小由下式决定y′=-f′·tanω(ω是物方视场角)。
相对孔径D/f'和光圈数F是镜头的关键光学指标。相对孔径,它表示能进入镜头到达底片上的光能量,因而决定像平面照度,其定义为入瞳直径D与镜头焦距f'之比,暗景物和高速运动物体的照相需要大相对孔径物镜,大相对孔径物镜可以提高像平面照度,根据相对孔径大小,照相物镜分为弱光照物镜(D/f'1:6.3以下)普通物镜(D/f'1:5.6-1:3.5)强光物镜(D/f'1:2.8-1:1.4)超强光物镜(D/f'1:1-1:0.8)为了使同一镜头使用不同的环境,通常孔径光阑采用可连续变化的可变光阑。
相对孔径的倒数称为光圈系数,又称F数,照相镜头上标有F数,国家标准按照光通量的大小规定了各光级圈数的排列
0.7、1、 1.4、 2、 2.8 、4 、5.6、 8、 11、 16 、22···随着光圈数的加大,光孔变小,光通量减少,光圈每差一级,光通量相差一倍,对照相机镜头来说,F数越低,镜头相容性就愈好,使用范围更大。相对孔径还影响像面上获得清晰像的空间深度范围-景深,相对孔径越大,成像的景深越大,照相过程中调节光圈大小控制景深。
视场角2ω照相物镜的视场角2ω决定了物方空间的范围,照相物镜的视场由像平面上具有满意成像质量的圆形区域的直径决定,或由相机所采用感光元件的感光面尺寸决定。
照相物镜的基本类型:1、.按镜头焦距和视场角分为:标准镜头、短焦镜头、长焦镜头。2、按镜头焦距能否变化分为:定焦镜头、变焦镜头。
固定器和滤色片
固定器的作用,实际上就是来固定镜头,另外固定器上还会有一块滤色片。
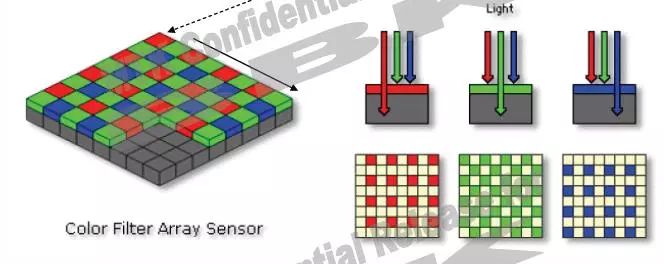
滤色片也即“分色滤色片”,目前有两种分色方式,一种是RGB原色分色法,另一种是CMYK补色分色法。
原色CCD的优势在于画质锐利,色彩真实,但缺点则是噪声问题,一般采用原色CCD的数码相机,ISO感光度多半不会超过400。相对的,补色CCD多了一个Y黄色滤色器,牺牲了部分影像的分辨率,但ISO值一般都可设定在800以上。
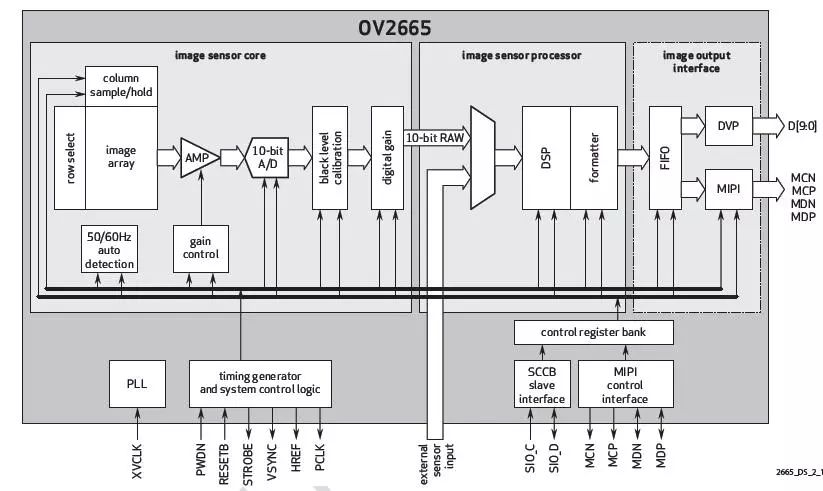
DSP(数字信号处理芯片)
它的功能是通过一系列复杂的数学算法运算,对数字图像信号进行优化处理,最后把处理后的信号传到显示器上。
DSP结构框架:(1). ISP(image signal processor)(镜像信号处理器);(2). JPEG encoder(JPEG图像解码器)。
ISP的性能强大是决定影像流畅的关键,JPEG encoder的性能也是关键指标之一。而JPEG encoder又分为硬件JPEG压缩方式,和软件RGB压缩方式。
DSP控制芯片的作用是:将感光芯片获取的数据及时快速地传到baseband中并刷新感光芯片,因此控制芯片的好坏,直接决定画面品质(比如色彩饱和度、清晰度)与流畅度。
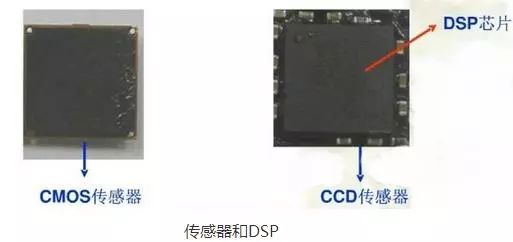
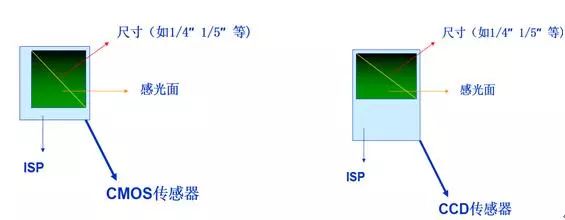
上面所说的DSP是CCD中会使用,是因为,在CMOS传感器的摄像头中,其DSP芯片已经集成到CMOS中,从外观上来看,它们就是一个整体。而采用CCD传感器的摄像头则分为CCD和DSP两个独立部分。
图像传感器
在摄像头的主要组件中,最重要的就是图像传感器了,因为感光器件对成像质量的重要性不言而喻。
传感器将从镜头上传导过来的光线转换为电信号,再通过内部的DA转换为数字信号。由于传感器的每个pixel只能感光R光或者B光或者G光,因此每个像素此时存贮的是单色的,我们称之为RAW DATA数据。要想将每个像素的RAW DATA数据还原成三基色,就需要信号处理器ISP来处理。
图像传感器是起感光记录作用的元件,和胶卷类似。有CMOS和CCD两种类型 CCD又叫电荷转移器件,光电二极管排成一列叫一维型直线式传感器,光电二极管行排列叫二维型面积式图像传感器。
CCD由光电二极管感光部件、ccd转移部件和电荷放大器件组成,当光照射时,光子激发电荷,电荷产生堆积,感光部件与转移部件之间加上栅电压,堆积的电荷在栅电压的作用下,开始定向移动至转移部件,经放大输出,这些输出的电荷信号带有图像信息。
图像传感器的发展趋势是高敏感化、高分辨率、省电、低压工作等高性能方向发展。
CMOS图像传感器由金属氧化物半导体集合而成,每一个像素可以集成多种器件,比如放大器,A/D转换器等。
两种感光元件的不同之处:
CCD成像质量好,但是制作起来比较复杂,而且耗能大,CMOS虽然成像质量较差,但是驱动电压低,制造简单,CMOS可以和其他器件集成,每一个像素都可以实现完整的功能,相比CCD是成千上万个像素排列,每一个像素激发的电荷汇集到一起,运输到放大器和数据处理器,这样给后续处理增加不少负担,而且大量的电荷汇集,也给通道提出了更高的要求,在技术上出现了瓶颈,CMOS中每个像素单独完成信号放大和信号处理工作,这些特点,造成CMOS噪声较大。如果CMOS克服噪声大的缺点,提高成像质量,CMOS就会超越CCD,成为图像传感器的首选。
有的厂家在宣传中会提到“背照式”“BSI”等概念,实际上BSI就是背照式CMOS的英文简称,背照式CMOS是CMOS的一种,它改善了传统CMOS感光元件的感光度,在夜拍和高感的时候成像效果相对好一些。
手机摄像头的成像原理
物方光线进入系统,经过镜头,到达图像传感器,光子打到传感器上产生可移动电荷,这是内光电效应,可移动电荷汇集形成电信号,由于处理器无法识别电荷信号,需要把电信号转化为数字信号,对于图像传感器是cmos的系统不需要外加模数转换器,而对于以ccd作为图像传感器的系统需要A/D转换器,经过模数转换器件,电荷信号转换成数字信号,数字信号经过放大电路进入微处理器,数字信号经过DSP数字信号处理芯片经过存储处理后,传输到屏幕形成和物一样的图像。
影响手机摄像头性能的一些关键因素
像素
通常所说的“XXX万像素”实际是指相机的分辨率,其数值大小主要由相机传感器中的像素点(即最小感光单位)数量决定,例如500万像素就意味着传感器中有500万个像素点,和手机屏幕中的像素数量决定屏幕是720p或1080p分辨率是一个道理。
像素决定照片质量?
通常会以为相机像素越高,拍的照片就越清晰,实际上。相机的像素唯一能决定的是其所拍图片的分辨率,而图片的分辨率越高,只代表了图片的尺寸越大,并不能说明图片越清晰。
但是当前主流的手机屏幕为1080p级别(1920×1080像素),无论是1300万像素相机所得的4208×3120像素照片,还是800万像素摄像头的3200×2400像素照片,都超出了1080p屏的解读范围,最终都会以1920×1080像素显示,所以肉眼所看到的清晰度也是没有区别的。
高像素的优势在哪里呢?
更高像素的相机所拍图片的尺寸更大,假如我们想把样张打印出来,以常规的300像素/英寸的打印标准来计算,1300万像素相机所拍的4208×3120像素样张,可打印17英寸照片,而800万像素相机的3200×2400像素样张,打印超过13英寸的照片就开始模糊了。很显然1300万像素相机样张可打印的尺寸更大。
传感器
既然像素不是决定图片质量的关键因素,那么谁才是呢?答案是传感器。
相机传感器主要分两种:CCD和CMOS。CCD传感器虽然成像质量好,但是成本较高,并不适用于手机,而CMOS传感器凭借着较低的功耗和价格以及优异的影像品质,在手机领域应用最为广泛。
CMOS传感器又分为背照式和堆栈式两种,二者系出同门,技术最早都由索尼研发,索尼背照式传感器品牌名为“Exmor R”,堆栈式传感器为“Exmor RS”。
相对来说,传感器尺寸越大,感光性能越好,捕捉的光子(图形信号)越多,信噪比越低,成像效果自然也越出色,然而更大的传感器却会导致手机的体积、重量、成本增加。
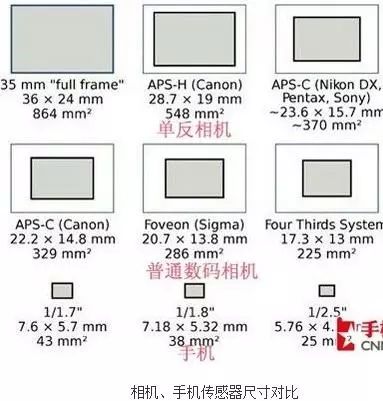
背照式传感器的出现,有效的解决了这个问题,在相同尺寸下,它使传感器感光能力提升了100%,有效地改善了在弱光环境下的成像质量。
2012年8月,索尼发布了全新堆栈式传感器(Exmor RS CMOS),需要注意的是,它和背照式传感器并非演进关系,而是并列关系,堆栈式传感器的主要优势是在像素数保持不变的情况下,让传感器尺寸变得更小,也可以理解为,在与背照式传感器的像素数相同时,堆栈式传感器的尺寸会更小,从而节省了空间,让手机变得更薄、更轻。
镜头
镜头是将拍摄景物在传感器上成像的器件,相当于相机的“眼睛”,通常由由几片透镜组成,光线信号通过时,镜片们会层层过滤杂光(红外线等),所以,镜头片数越多,成像就越真实。
光圈
光圈由镜头中几片极薄的金属片组成,可以通过改变光圈孔的大小控制进入镜头到达传感器的光线量。光圈的值通常用f/2.2、f/2.4来表示,数字越小,光圈就越大,两者成反比例关系。
它的工作原理是,光圈开得越大,通过镜头到达传感器的光线就越多,成像画面就越明亮,反之画面就越暗。因此,在夜拍或暗光环境下,大光圈的成像优势就更明显。
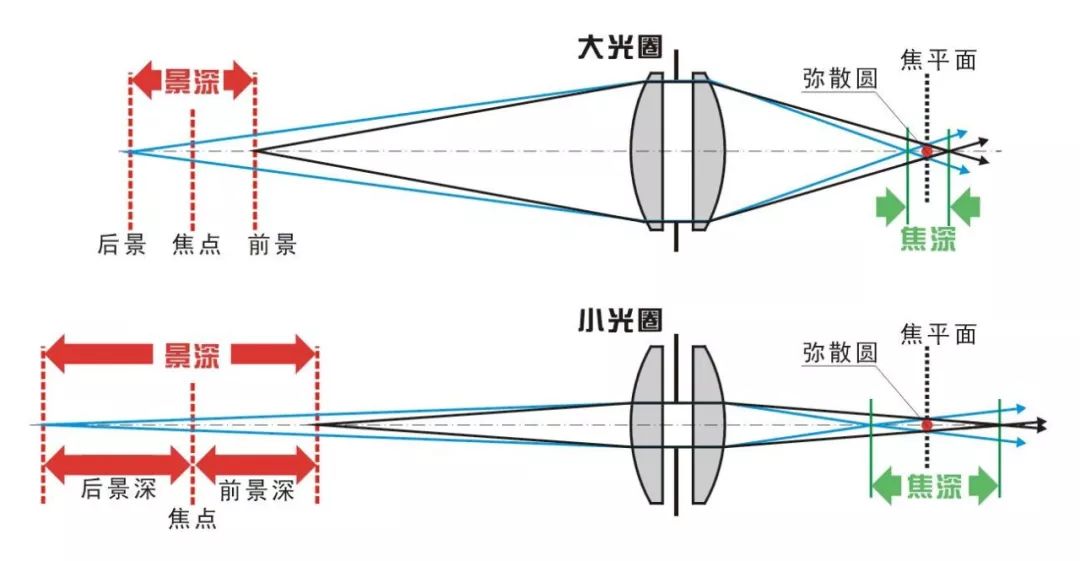
除了控制通光量,光圈还具有控制景深的功能。生活中,我们时常会看到背景虚化效果很强的照片,不仅突出了拍摄焦点,还具有很唯美的艺术感,而这就是所谓的景深。光圈开的越大,景深越小,背景虚化效果就更明显。
-
回收手机摄像头专业优势收购手机摄像头2020-12-24 0
-
回收手机摄像头 收购oppo手机摄像头2021-01-07 0
-
重庆回收手机摄像头2021-03-10 0
-
回收手机摄像头 收购手机摄像头2021-07-05 0
-
回收手机摄像头,收购摄像头芯片2021-07-14 0
-
专业回收手机摄像头 收购手机摄像头价格高2021-10-16 0
-
深圳回收华为手机摄像头 专业收购华为手机摄像头2021-12-13 0
-
手机摄像头组成结构及手机摄像头的成像原理2018-04-12 24242
-
手机摄像头结构分析及测试中弹片微针模组的优势2020-04-15 1892
-
手机摄像头的组成和发展趋势2020-05-28 3082
-
手机摄像头的组成性能测试可选用弹片微针模组2020-10-27 1302
-
手机摄像头组成结构2021-01-21 16852
-
什么是手机摄像头模组holder2023-05-31 953
-
手机摄像头的组成结构及成像原理2023-10-25 699
-
手机摄像头组成结构及成像原理2024-03-25 617
全部0条评论

快来发表一下你的评论吧 !
