

多旋翼无人机的发展及特点在通信应用中存在的问题
电子说
描述
近年来,无人机飞速发展,形成了繁多的种类。其中,能够用于完成各类战术任务的无人机称为战术无人机。战术无人机包括了固定翼和旋翼等多种类型的无人机。
战术无人机主要用于战场的视频侦察监视和无线通信中继领域。其中,利用无人机作为通信中继平台进行通信支持,与卫星通信和陆地移动通信相比,具有部署方便、控制灵活且通信设备容易升级换代的优点。美军《无人机系统路线图2005-2030》中对利用无人机作为通信中继平台进行了相应规划。
通常用于构建通信中继系统的平台主要为固定翼无人机和无人直升机,这些平台既具有载荷搭载能力较强、飞行距离远、滞空工作时间较长等优点,也存在体比较大、地面测控和保障系统复杂、维护保养要求高等缺点。因此,固定翼无人机和无人直升机平台主要适用于上百公里范围的通信保障,对小范围高机动战术作战通信保障的性价比较低。新近发展起来的微小型多旋翼无人机在战术通信领域更具优势。
多旋翼无人机的发展及特点
1.1 多旋翼无人机的发展
早在20世纪初和中期,法、美等国已开始研制四旋翼飞机。但由于当时的设计受困于极差的发动机性能,飞行高度仅仅能达到几米,而且操作十分复杂,在速度、载重量、续航能力等方面无法与传统飞行器竞争,军事应用价值也不高。直到20世纪90年代之后,随着微机电系统(Micro-Electro Mechanical Systems,MEMS)研究的成熟,重量只有几克的MEMS惯性导航系统被开发运用,使制作多旋翼飞行器的自动控制器成为现实。但是由于当时单片机的运算能力有限,不足以满足复杂的多旋翼飞行自动控制器算法的需要,多旋翼飞行器只是以独特的方式通过玩具市场进入消费领域。2005年~2010年德国Microdrones公司先后推出的md4系列四旋翼无人机系统在全球专业无人机市场取得了成功。在学术方面,2005年之后四旋翼飞行器需求快速发展,更多的学术研究人员开始研究多旋翼,使得一些制约多旋翼飞行器系统的瓶颈技术得到逐步解决,多旋翼无人机的集成化、小型化、模块化、标准化、自动化水平迅速提高。特别是近两三年来,移动终端大量应用加速计、陀螺仪、地磁传感器等,MEMS惯性传感器大规模兴起,集成度更高,成本更低,有力地推动了多旋翼无人机技术的发展。目前,中国已有多家民营企业生产多旋翼无人机,并占据了相当大的国际市场。
1.2 多旋翼无人机的特点
与固定翼无人机和无人直升机相比,多旋翼无人机具有以下特点:
在操控性方面,多旋翼无人机的操控是最简单的。它不需要跑道便可垂直起降,起飞后可在空中悬停。
在可靠性方面,多旋翼表现最出色。多旋翼无人机没有活动部件。它的可靠性基本上取决于无刷电机的可靠性,因此可靠性比较高。
然而,多旋翼也有自身的发展瓶颈。它的运动和简单结构都依赖于螺旋桨及时的速度改变,以调整力和力矩。该方式不宜推广到更大尺寸的多旋翼。当然,可以通过增加桨叶的方法提高多旋翼载重能力,但该方式会极大地降低可靠性、维护性和续航性。种种原因分析表明,最具发展优势的是微小型多旋翼无人机[1]。
例如,某微型四旋翼无人机的主要性能参数:最大起飞重量为5 550 g;最大有效载荷为1 200 g;电池重量为1 750 g;留空时间约40 min(有效载荷500 g时);爬升速率为7.5 m/s;巡航速度为15.0 m/s;环境风力为9 m/s;飞行高度为最大1 000 m;工作海拨为最大4 000 m;动力配置4×250 W盘式无刷直驱电机;导航系统为DGPS;控制方式:遥控、GSM网络遥控、自动驾驶。
1.3 在通信应用中存在的问题
微小型多旋翼无人机系统日渐成熟。因其具有便于携行、起降环境要求低,操作简单、训练保障要求低,无需空域协调等突出特点,在航拍、监视、快递投送等民用领域发展迅速;在军事领域也已成功应用于侦察监视和地理测绘。
然而,由于现有微型多旋翼无人机都采用电池供电,续航时间十分有限。一般搭载约1 kg任务载荷条件下的滞空时间还不到1小时。虽然采用多架无人机轮流工作的方式也是一种解决方案,但保障性将大打折扣。在实际战术环境下,由于微型多旋翼无人机无法提供持续的通信中继保障,直接由其构建的通信中继节点基本不具备实用性。
因此,要将多旋翼无人机用于无线通信中继,必须解决持续滞空问题。最近出现的系留多旋翼无人机采用地面有线系留供电的方式实现多旋翼持续滞空工作,为多旋翼无人机在战术通信中的应用开辟了新思路。
系留多旋翼无人机工作原理和特性
2.1 系统组成
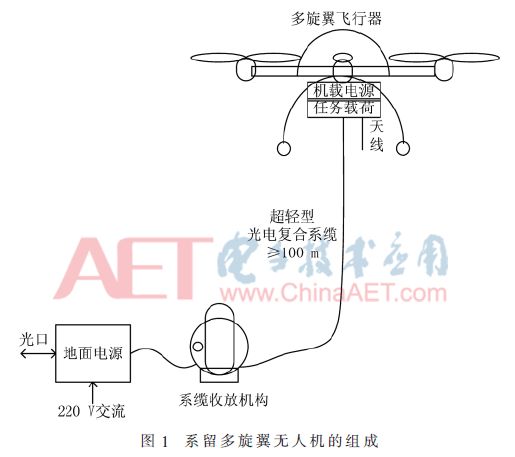
系留多旋翼无人机是在普通多旋翼无人机上外挂系留机载电源模块和超轻型光电复合系缆,连接地面电源设备,代替原来的机载电池[2]。如图1所示,系统主要组成包括:多旋翼飞行器、任务载荷(含天线)、机载电源、超轻型复合系缆、系缆收放机构以及地面电源设备等。
2.2 工作原理及性能
系留多旋翼无人机的最关键改进是增加了系留供电系统,其基本原理如图2所示[2]。地面电源将地面220 V交流电变换为高压后通过系缆传输到机载电源,再变换为飞行器及任务载荷的供电电源。系缆中除了供电导线,还有两条单模光纤,可用于机载任务载荷与地面设备之间的宽带信号通信。
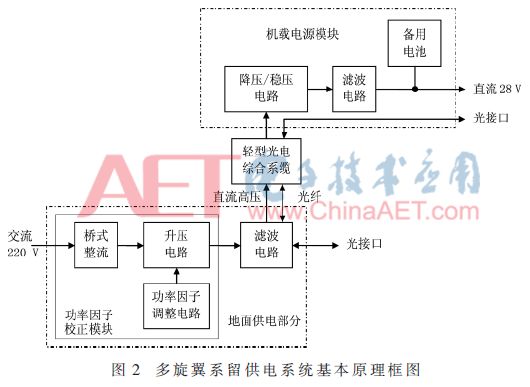
地面供电部分中功率因子校正模块效率可达95%以上,飞行器及载荷的供电直流28 V的额定输出电流约为40 A(输出功率1 120 W)。
轻型光电综合系缆由2根电线、2根B1.1单模紧包光纤和芳纶绞合而成,缆芯外松包聚乙烯护套。系缆可承受100 N拉力,导体直流电阻不大于0.094 Ω/m,绝缘线芯间耐压1 000 V,重量仅约11 g/m。
机载电源模块代替了原自由飞行四旋翼无人飞行器的电池部分,峰值功率可达1 500 W,效率可达90%以上。在机载电源模块中还保留一个小容量的锂电池,用于地面供电发生意外中断或系留供电系统出现故障时给飞行器提供应急电能,保证飞行器有足够的时间安全降落回地面。整个机载电源模块连同附着有散热片的结构外壳总重量不大于1 200 g。
有效载荷包括任务载荷重量以及从飞行器到地面所用系缆重量。根据系缆单位长度重量11 g/m可得出不同任务载荷重量条件下的可搭载系缆长度,也即最大滞留高度如表1所示。可见,当系留飞行高度为100 m时,有效的任务载荷能力约为1 kg。

系留多旋翼无人机在军事通信中的应用
3.1 军事需求
未来一体化战斗系统追求真正的移动通信,作战人员在宽带移动的网络中移动作战指挥,各作战平台之间无缝宽带连接共享信息。然而在地面通信网络中,连通性、移动性和大容量之间相互矛盾,提高任何一方的性能都会限制其他两个性能的发挥,综合提高连通性、移动性和大容量是军事通信发展面临的关键挑战。卫星通信和大中型无人机空中通信节点能够有效地解决军事通信中覆盖、移动和大容量之间的矛盾。然而由于卫星资源有限,大中型无人机起降、保障条件要求苛刻,无法满足轻型高机动步兵、特种作战、空降、海军陆战队等旅以下前出部(分)队末端战术通信保障需求。
通过上述分析可见,系留多旋翼无人机小巧轻便,在100 m高度系留悬停时仍有约1 kg的载荷搭载能力,并且采用地面电源持续供电工作,没有续航时间限制,而且开设迅速、无需空域申请、操作保障简单,是一个非常好的通信中继平台。
3.2 通信覆盖预计
升空无线中继平台主要是通过升高通信设备获得视距的延伸,将非视距传播信道改变为视距传播信道,实现通信距离或覆盖范围的改善。通常情况下,视距随升空高度的增加而增加,相应的传播条件改善也更显著。考虑折射效应,视距的计算公式为:

式中,do为视距,单位为km;h1和h2为两端升空高度或天线高度,单位均为m。
在理想的平坦地表,若通信双方均采用手持设备通信时,天线高度均为1.5 m,理论计算视距为10.1 km。而当其中一方采用系留多旋翼无人机平台升高到100 m时,视距改善为46.2 km。
视距只是在理想条件下的通信极限距离,而在实际应用中,设备的通信距离受地形地物条件、通信载荷设计指标影响。在移动通信系统中,奥村模型是在大量场强测试基础上,经过对数据分析与统计处理后,描述各种地形地物下传播损耗与距离、频率以及天线高度关系的经典电波传播预测模型。下面以美军典型战术通信电台为例,根据典型设计指标估算采用系留多旋翼无人机搭载升空后,在地形地物条件下的通信覆盖能力,并与地面不升空使用时通信覆盖进行对比。
美军现役战术电台中,3种典型设备的主要射频指标如表2所示。为便于计算,工作频率取各设备最高工作频率的近似值。功率和天线指标考虑了常规多旋翼无人机平台可搭载能力。

奥村模型以准平坦地形大城市地区的路径损耗为基准,对不同传播环境和地形条件等因素用校正因子加以修正。基本计算方法如下:
自由传播损耗:
式中,Am(f,d)为大城市中当基站天线高度hb为200 m、移动台天线高度hm为3 m时,相对自由空间的中值损耗;Hb(hb,d)为基站天线高度增益因子,即实际基站天线高度相对于标准天线高度hb为200 m的增益;Hm(hm,f)为移动台高度增益因子。Am(f,d)、Hb(hb,d)和Hm(hm,f)在模型中都可以查阅文献[3]中的图表获得。
以准平坦地形中的中值路径损耗为基础,针对不同传播环境和不规则地形中的各种因素,用修正因子加以修正,就可得到不规则地形及环境中的中值路径损耗。如郊区、丘陵、水陆混合地区中值路径损耗计算式分别为:

其中,Kmr、Kh、Ks分别是郊区、丘陵、水陆混合地形修正因子。
在此基础上,根据各通信载荷的射频指标,包括发射功率P、天线增益(发天线增益GT和收天线增益GR)、接收灵敏度S等,可获得不同传播环境下不同设备在不同覆盖距离时的链路余量:

式中,链路损耗L根据不同场景选择相应计算公式,如L城区、L郊区、L水陆等。
当式(7)中A=0时,对应的距离d的值即为相应条件下的极限覆盖半径。
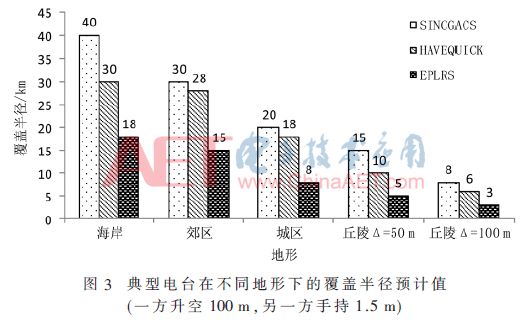
基于奥村模型,对表2所列3种典型战术通信电台在升空100 m条件下的通信覆盖能力进行估算。通过查阅奥村模型中的相关图表,带入式(7)计算得到海岸(水陆比例100)、郊区、城区、50 m高差丘陵及100 m高差丘陵5种不同地形地物条件下通信覆盖半径预计值,如图3所示。
根据文献[4]中得到的类似电台在地面通信距离的预计结果,分别对比各种地形条件下双方均在地面通信与单方升空100 m通信时的3种设备的极限覆盖半径,如图4所示。
由图4对比可见,地形对通信距离的影响随着起伏高差的增加而增大;相同地形条件下,频率较高或带宽较宽的战术电台的通信距离较小。与地面通信相比,采用系留多旋翼无人机升空100 m对各种地形下的覆盖能力都有明显的改善,覆盖半径扩大至少4倍以上。对比不同类型战术电台在海岸、城区或丘陵地形的覆盖效果可见,地形越复杂改善效果越明显,这是由于升空后有效克服了地形地物对信号传播的遮挡,实现了视距直射传播。
3.3 应用特点及发展趋势
系留多旋翼无人机体积小巧,可以单兵携带,也可采用轻型车辆装载,对起降场地和维护保养要求很低,非常适用于班排级小型机动作战单位使用。主要作战应用场景包括:
(1)改善作战单元内部的通信覆盖率。采用系留多旋翼无人机将作战单元内重要成员(如班长)的电台升高,形成优势节点,实现与其他成员的可靠连接,构成星形全连通网络,解决由于地形地物的遮挡造成的作战单元内部各成员之间的通信不畅问题。
(2)作为作战单位之间的横向协作通信链路。当作战单位之间需要协作沟通但又因距离或地形影响无法直接建立连接时,各单位可采用系留多旋翼无人机搭载一部电台升高,建立跨作战单位的超视距沟通链路,实现作战单位间的横向协作通信。
(3)作为信息回传通道。当前出作战单位远离后方通信基础设施或无线传输路径上被障碍遮挡无法直接通信时,可采用系留多旋翼无人机搭载一部电台升高,建立作战单位与后方基础设施之间的沟通桥梁,实现作战信息和回传。
目前,受多旋翼无人机载荷能力的限制,可搭载的通信中继设备重量一般不能大于2 kg。所以大部分战术通信电台无法直接搭载,必须进行轻量化改进。在设计系留多旋翼无人机通信中继平台时,还应尽量减小无人机和系留供电系统的电磁干扰辐射,避免对通信载荷造成干扰,影响通信效果。
不久的将来,随着无人机技术的发展,多旋翼无人机的工作效率、载荷能力和稳定性将进一步提升,系留多旋翼无人机通信中继平台的通信载荷能力、升空高度、通信覆盖能力也相应提高,将实现具有多机自组网、一机多信道灵活配置、干线组网与无线接入结合等强大功能的超低空战术通信网络。
结论
通过加装系留供电系统,可以解决多旋翼无人机的持续滞空问题,为其在战术通信领域的应用创造了条件。将系留多旋翼无人机作为通信中继平台能改善战术电台的覆盖范围,可应用于机动作战单位的内部通信、横向通信及对上回传通信,显著提高作战指挥能力。随着相关技术的推动,未来由系留多旋翼无人机平台构成的超低空战术通信网络具有不可低估的发展前景。
-
【AWorks280试用申请】通用多旋翼无人机安全保护系统2015-10-23 0
-
四旋翼无人机的代码2016-06-26 0
-
无人机飞手紧缺 看无人机行业发展趋势如何?2016-06-28 0
-
无人机培训2017-02-13 0
-
无人机类型之植保无人机,带你了解什么是植保无人机?2019-06-28 0
-
电子大赛四旋翼无人机尺寸2019-07-08 0
-
四旋翼无人机的使用指南2019-09-16 0
-
怎样去设计四旋翼无人机飞控系统2021-07-19 0
-
四旋翼无人机运动原理2021-08-09 0
-
手把手教你如何去制作无刷四旋翼无人机2021-08-19 0
-
小白带你入坑四旋翼无人机——物料篇 精选资料推荐2021-09-02 0
-
关于固定翼航模及四旋翼无人机基础总结的太棒了2021-09-23 0
-
多旋翼无人机由哪几部分组成?2021-09-24 0
-
基于STM32F407的四旋翼无人机由哪些模块组成的2021-10-20 0
-
多旋翼无人机飞控系统的设计资料分享2021-11-11 0
全部0条评论

快来发表一下你的评论吧 !
