
资料下载


×
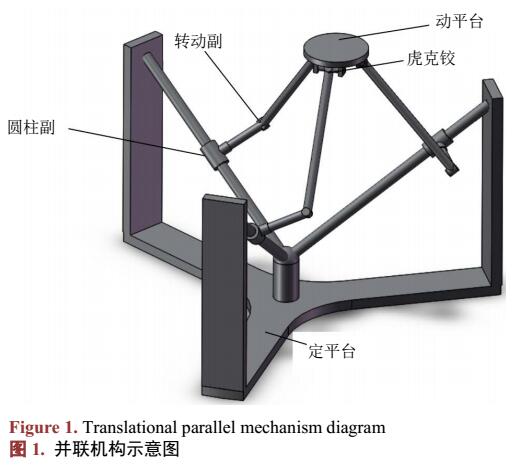
3-CRU并联机构的动力学建模
消耗积分:1 |
格式:rar |
大小:0.74 MB |
2018-04-20
分享资料个
并联机构是一个闭环运动系统,这一系统有多个运动链,每条链的一端都会与一个具有多自由度的移动终端(平台)相连。并联机构的这一特点使这种结构拥有许多传统机构所不具备的优点,这些优点的价值在近些年引起了学术界的大量关注。与此同时工业生产也开始大量的采用这类机构。该机构作为一种技术密集型的高新设备,具有高刚度、高承载能力、灵活的末端调节、低惯性,并且机构的末端不会积累误差。这些新出现的特点刚好弥补已有的串联机构带来的不足。在进入二十一世纪以来,大量的研究工作开始转向这个新颖的构型,并逐步挖掘了大量的新构造,使这一构型产生了飞速的发展。从目前的研究方向来看,数量最多的就是六自由度的并联构型。但是在长期的现场生产中发现,自由度过高对于生产并不是十分有利,而且会有很大的经济负担。因此我们开始查找是否有经济性更好的设备而且该设备可以满足目前的生产需要。于是少自由度并联机构开始进入人们的视野。

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章





