

以Spartan3系列为例 详解FPGA DCM
可编程逻辑
描述
DCM主要功能
1. 分频倍频:DCM可以将输入时钟进行Multiply或者Divide,从而得到新的输出时钟。
2. 去Skew:DCM还可以消除Clock的Skew,所谓Skew就是由于传输引起的同一时钟到达不同地点的延迟差。
3. 相移:DCM还可以实现对输入时钟的相移输出,这个相移一般是时钟周期的一个分数。
4. 全局时钟:DCM和FPGA内部的全局时钟分配网络紧密结合,因此性能优异。
5. 电平转换:通过DCM,可以输出不同电平标准的时钟。
DCM的特点与能力(Spartan-3系列为例)
数量:4 DCM / FPGA(也有例外)
-- 应该够用了
数字频率综合器输入(CLKIN):1-280MHz
延迟锁相环输入(CLKIN):18-280MHz
时钟输入源(CLKIN):
Global Buffer Input Pad
Global Buffer Output
General-Purpose I/O (No Deskew)
Internal Logic (No Deskew)
-- 上面最后两个分别是外部的普通IO口和内部的逻辑,没有Deskew,所以时钟质量不会很好。
频率综合器输出(CLKFX、CLKFX180):是CLKIN的M/D倍,其中
M=2..32
D=1..32
-- 这样看来最大能倍频32倍,最小能16分频。
时钟Dividor输出(CLKDV):是CLKIN的下列分频
1.5, 2, 2.5, 3, 3.5, 4, 4.5, 5, 5.5, 6, 6.5, 7, 7.5, 8, 9, 10, 11, 12, 13, 14, 15, Or 16
-- 发现没有,最大的分频也是16。不过能支持半分频,比用频率综合器方便。
倍频输出(CLK2X、CLK2X180):CLKIN的2倍频
时钟Conditioning、占空比调整:这个对所有时钟输出都施加,占空比为50%。
1/4周期相移输出(CLK0/90/180/270):是CLKIN的1/4周期相移输出。
半周期相移输出(CLK0/180、CLK2X/180、CLKFX/180):相差为180度的成对时钟输出。
相移精度:最高精度为时钟周期的1/256。
时钟输出:9个
到全局时钟网的时钟输出:最多9个中的4个
到General Purpose互联:最多9个
到输出脚:最多9个
-- 可见9个时钟输出可以随意链接内部信号或者外部输出,但是进入全局时钟网的路径最多只有4个。
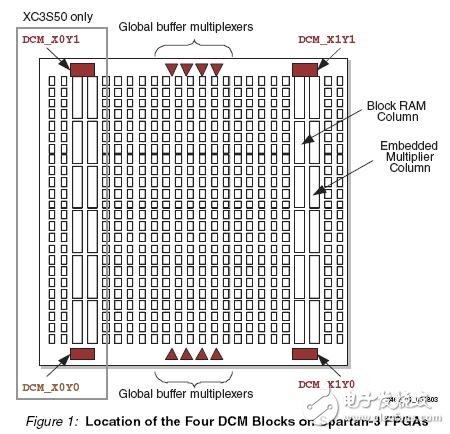
DCM的位置在哪?
我们以Spartan3系列为例。
FPGA看上去就是一个四方形。最边缘是IO Pad了。除去IO Pad,内部还是一个四方形。四个角上各趴着一个DCM。上边缘和下边缘中间则各趴着一个全局Buffer的MUX。这样的好处是四个DCM的输出可以直接连接到全局Buffer的入口。
下面是手绘简图,很丑是吧,呵呵。
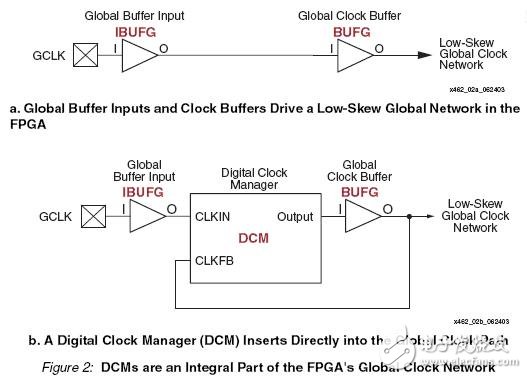
DCM是全局时钟网络可选的一部分
一般,时钟通过一个“全局输入Buffer”和“全局时钟Buffer” 进入全局时钟网络。如下所示
GCLK ---》( IBUFG ---》 BUFG) ---》 Low Skew Global Clock Network
在需要的时候,DCM也成为全局时钟网络的一环。

DCM 内部构成一览
1. DLL 延迟锁定环
说是延迟锁定环,但是我觉得叫做延迟补偿环更加贴切。因为DLL的主要功能是消除输入时钟和输出时钟之间的延迟,使得输入输出在外部看来是透明连接。
实现这种功能的原理是:DLL通过输出时钟CLK0或者CLK2X观察实际的线路延迟,然后在内部进行补偿。
一句话,DLL的核心功能是无延迟。
DLL的输出是CLK0, CLK90, CLK180, CLK270, CLK2X, CLK2X180, 和 CLKDV。
2. DFS 数字频率综合
DFS的主要功能是利用CLKIN合成新的频率。
合成的参数是:M(Multiplier)和 D(Divisor)。通过MD的组合实现各种倍频和分频。
如果不使用DLL,则DFS的合成频率和CLKIN就不具有相位关系,因为没有延迟补偿,相位就不再同步。
3. PS 相位偏移
注意这个相位偏移不是DLL中输出CLK90/180/270用的。这个PS可以令DCM的所有9个输出信号都进行相位的偏移。偏移的单位是CLKIN的一个分数。
也可以在运行中进行动态偏移调整,调整的单位是时钟的1/256。
这个功能我们平时不常用。
4. 状态逻辑
这个部分由 LOCKED 信号和 STATUS[2:0] 构成。LOCKED信号指示输出是否和CLKIN同步(同相)。STATUS则指示DLL和PS的状态。
DCM_BASE
DCM_BASE是基本数字时钟管理模块的缩写,是相位和频率可配置的数字锁相环电路,常用于FPGA系统中复杂的时钟管理。如果需要频率和相位动态重配置,则可以选用DCM_ADV原语;如果需要相位动态偏移,可使用DCM_PS原语。DCM系列原语的RTL结构如图3-8所示。
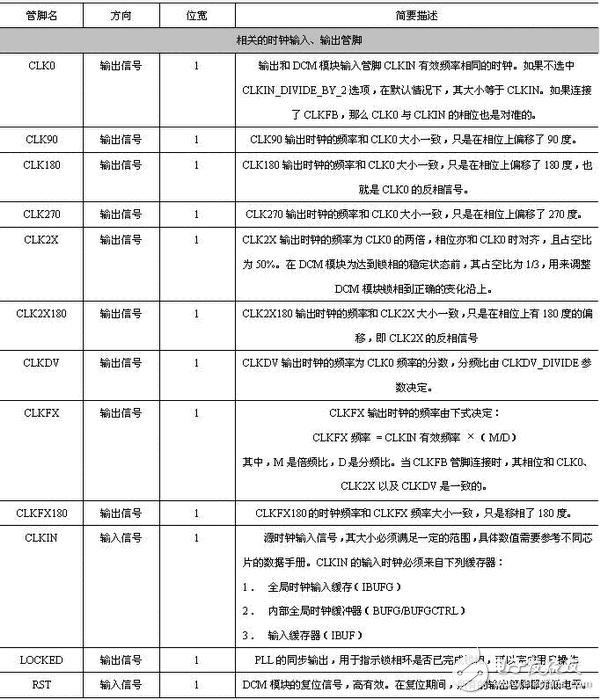
模块接口信号的说明如表3-8所列。
DCM_BASE组件可以通过Xilinx的IP Wizard向导产生,也可以直接通过下面的例化代码直接使用。其Verilog的例化代码模板为:
// DCM_BASE: 基本数字时钟管理电路(Base Digital Clock Manager Circuit)
// 适用芯片:Virtex-4/5
// Xilinx HDL库向导版本,ISE 9.1
DCM_BASE #(
.CLKDV_DIVIDE(2.0),
// CLKDV分频比可以设置为: 1.5,2.0,2.5,3.0,3.5,4.0,4.5,5.0,5.5,6.0,6.5
// 7.0,7.5,8.0,9.0,10.0,11.0,12.0,13.0,14.0,15.0 Or 16.0
.CLKFX_DIVIDE(1), // Can Be Any Integer From 1 To 32
// CLKFX信号的分频比,可为1到32之间的任意整数
.CLKFX_MULTIPLY(4),
// CLKFX信号的倍频比,可为2到32之间的任意整数
.CLKIN_DIVIDE_BY_2(“FALSE”),
// 输入信号2分频的使能信号,可设置为TRUE/FALSE
.CLKIN_PERIOD(10.0),
// 指定输入时钟的周期,单位为Ns,数值范围为1.25~1000.00。
.CLKOUT_PHASE_SHIFT(“NONE”),
// 指定移相模式,可设置为NONE或FIXED
.CLK_FEEDBACK(“1X”),
// 指定反馈时钟的频率,可设置为NONE、1X或2X。相应的频率关系都是针对CLK0而言的。
.DCM_PERFORMANCE_MODE(“MAX_SPEED”),
// DCM模块性能模式,可设置为 MAX_SPEED 或 MAX_RANGE
.DESKEW_ADJUST(“SYSTEM_SYNCHRONOUS”),
// 抖动调整,可设置为源同步、系统同步或0~15之间的任意整数
.DFS_FREQUENCY_MODE(“LOW”),
// 数字频率合成模式,可设置为LOW或HIGH 两种频率模式
.DLL_FREQUENCY_MODE(“LOW”),
// DLL的频率模式,可设置为LOW、HIGH或HIGH_SER
.DUTY_CYCLE_CORRECTION(“TRUE”),
// 设置是否采用双周期校正,可设为TRUE或FALSE
.FACTORY_JF(16‘’Hf0f0),
// 16比特的JF因子参数
.PHASE_SHIFT(0),
// 固定相移的数值,可设置为 -255 ~ 1023之间的任意整数
.STARTUP_WAIT(“FALSE”)
// 等DCM锁相后再延迟配置DONE管脚,可设置为TRUE/FALSE
) DCM_BASE_inst (
.CLK0(CLK0), // 0度移相的DCM时钟输出
.CLK180(CLK180), // 180度移相的DCM时钟输出
.CLK270(CLK270), // 270度移相的DCM时钟输出
.CLK2X(CLK2X), // DCM模块的2倍频输出
.CLK2X180(CLK2X180), // 经过180度相移的DCM模块2倍频输出
.CLK90(CLK90), // 90度移相的DCM时钟输出
.CLKDV(CLKDV), // DCM模块的分频输出,分频比为CLKDV_DIVIDE
.CLKFX(CLKFX), // DCM合成时钟输出,分频比为(M/D)
.CLKFX180(CLKFX180), // 180度移相的DCM合成时钟输出
.LOCKED(LOCKED), // DCM锁相状态输出信号
.CLKFB(CLKFB), // DCM模块的反馈时钟信号
.CLKIN(CLKIN), // DCM模块的时钟输入信号
.RST(RST) // DCM 模块的异步复位信号
);
// 结束DCM_BASE模块的例化过程
在综合结果分析时,DCM系列原语的RTL结构如图3-36所示。
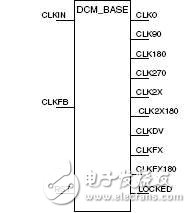
图3-36 DCM模块的RTL级结构示意图
Spartan-3 DCM的兼容性
S3 的DCM和 Virtex-II 以及Pro的DCM 功能基本相同。但是S3 DCM的技术属于3代技术,因此在抗噪性能、相移能力方面有进一步提高。(客观的说,对我们的普通应用,不是特别重要。)
但是和Spartan-2系列相比,有很大改进。S2系列不叫DCM叫DLL,可见DFS和PS等功能完全是新加入的,所以S2系列其实除了二倍频几乎没有倍频和分频能力。从这点来讲,S3真的是用起来很爽了。
DCM 输入时钟的限制
和所有物理器件一样,DCM的工作范围也是受限的。由于DLL和DFS的要求各不相同,因此DCM的输入频率的限制也视乎是否同时使用DLL和DFS还是单独使用其中之一。如果同时使用,则取限制较严格者作为整个DCM系统的限制。我们来看两者的独立限制。
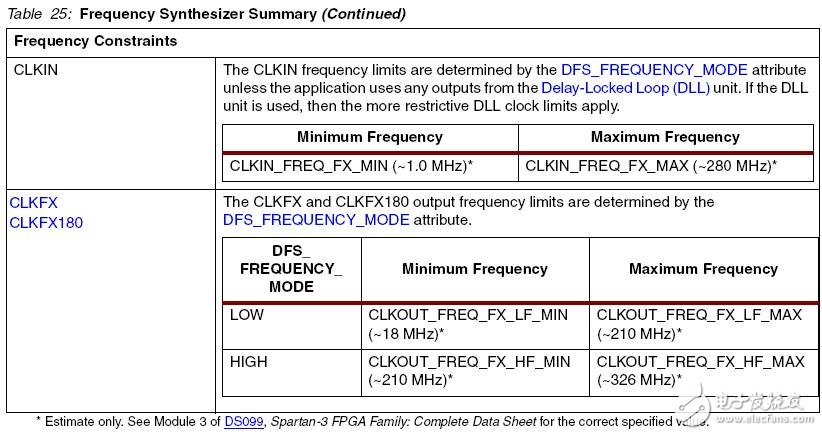
呵呵,这部分内容不用记哦,需要的时候查一下软件或者手册就可以了。只要明白“CLKIN输入频率有限制,而且DLL、DFS同时使用时取其严格者” 这些道理就可以了。
除了时钟限制之外,对于时钟的质量也有一定限制,主要有3个:
1. CLKIN Cycle-To-Cycle Jitter:约束了前后两个CLKIN周期的差异;
2. CLKIN Period Jitter:约束了100万个Cycle中最大周期和最小周期之间的差异;
3. CLKFB Path Delay Variation:约束了从外部进来的反馈回路的延迟波动,这种延迟波动在概念上其实和Jitter如出一辙。
具体数值请查手册,知道有这么回事就可以了。
LOCKED信号的行为方式
LOCKED信号用于指示整个DCM系统已经和CLKIN同步,从LOCKED信号有效开始,输出时钟才可以使用,在此之前,输出时钟可能会处于各种复杂的不稳定状态。我们来看一下LOCKED信号的行为状态机。
FPGA配置:
If (CLKIN已经稳定) Next_state = 判断同步;
Else Next_state = RST_DCM;
判断同步:
If (已经同步) Next_state = 判断同步;
Else Next_state = 同步失败;
同步失败: Next_state = RST_DCM;
RST_DCM: Next_state = FPGA配置;
现在来看看各个状态下的输出。
Case (State)
FPGA配置: LOCKED = 0;
判断同步: LOCKED = 1;
同步失败: LOCKED = 0;
RST_DCM:LOCKED = 0;
Endcase
RST 信号——重启锁定
RST信号用于在时钟不稳定或者失去锁定时,将DCM的相关功能重置,从而重新启动锁定追踪。
作为一个输入信号,RST无法被DCM自身置位,因此需要我们的应用设计来控制这个RST信号,否则需将其接地。
置位RST会将延迟Tap的位置置0,因此可能会产生Glitch或者是Duty Cycle 发生变化,另外相位偏移也会重置回到默认值。
DCM 生成向导
安装了ISE就能得到一系列Accessories。利用其中的Architecture Wizard 我们可以生成DCM模块。生成的DCM将产生3种输出:
1. 一个例化了DCM的逻辑综合文件(采用生产商特定格式的VHDL / Verilog)
2. 一个UCF文件控制特定实现
3. 所有其他用户设置都保存到XAW(Xilinx Architecture Wizard)文件中。
接下来描述一下向导使用步骤。
1. 从ISE或者Arch Wizard中启动界面;
2. 第一个页面做基本配置:路径、XAW文件名、VHDL / Verilog选择、综合工具、FPGA型号;
3. 进行General Setup,一看就明白,不细说,注意一下几点:
- CLKIN Source 如果选 External 则 DCM 的 CLKIN 会自动连接到 IBUFG。
- Feedback如果选 Internal 则反馈来自 BUFG。
4. 高级设置
- 选择FPGA的配置过程是否包含DCM的锁定,如果是,则配置完成信号DONE将在LOCKED信号有效后方能有效。
- 选择CLKIN是否要除2。由于DCM的输入频率有限,对于过高的输入时钟通过除2使之可用。
- Deskew调整,这个选项建议在咨询Xilinx工程师后再使用。
5. 时钟输出口 Buffer 设置
- 默认情况下所有输出口都链接 BUFG 全局时钟网络入口
- 由于全局时钟网络的入口有限,用户可以定制时钟输出口连接到其他类型的Buffer
- Global Buffer:进入全局时钟网络的入口Buffer,共有4个,简称BUFG
- Enabled Buffer:还是上面的4个全局时钟Buffer,但是配置为有使能信号控制,简称BUFGCE
- Clock MUX:还是上面的4个全局时钟Buffer,但是配置为 2-To-1 MUX类型,由S信号控制选出,简称BUFGMUX
- Low Skew Line:没有Buffer了,只能使用 Skew 比较小的连线
- Local Routing:连到本地,Skew的要求不是很严格
- None:禁止输出
- 对于Enabled Buffer类型和Clock Mux类型,需要指定En口的名字
- 需要为输出时钟信号指定名字或者使用默认
6. 设置DFS
- 设置目标输出频率,然后按Calculate,自动生成 M/D 值和 Jitter 值
- 或者手动设置 M/D 值,然后按Calculate,自动生成频率和 Jitter 值
7. 最后输出所需的3种文件。
-
Spartan3系列FPGA用户指南(中文版)2013-02-27 0
-
转载----DCM使用详解2015-09-24 0
-
谁设计过Spartan3的DDS? 求指导2017-01-11 0
-
Spartan3 FPGA的编程和非编程没有任何输出2019-01-10 0
-
测量spartan3静态功耗2019-05-20 0
-
Isthis Flash与Xilinx Spartan3 FPGA兼容吗?2019-06-03 0
-
请问我的Spartan3 / AN上的FPGA上有这个IP核功能吗?2019-07-19 0
-
是否有适用于SPARTAN3的VIVADO附加软件包?2019-07-26 0
-
如何连接Virtex5 2.5V LVCMOS IO至3.3V LVCMOS Spartan3 FPGA?2020-06-16 0
-
QDR SRAM与Spartan3 FPGA的接口设计2011-06-01 4765
-
基于Spartan3火龙刀系列FPGA开发板制作的VGA实验例程2016-06-07 845
-
实现基于spartan3与CAN总线连接后的的汽车时速的模拟仿真2016-06-07 744
-
SPARTAN3 AN系列电路设计及使用注意事项2017-01-11 1143
-
Spartan-6 FPGA中的DCM功能介绍2018-11-22 4913
-
FPGA-DCM使用详解2021-09-28 519
全部0条评论

快来发表一下你的评论吧 !
