

74hc595通过ULN2003驱动8*8LED点阵屏
电子说
描述
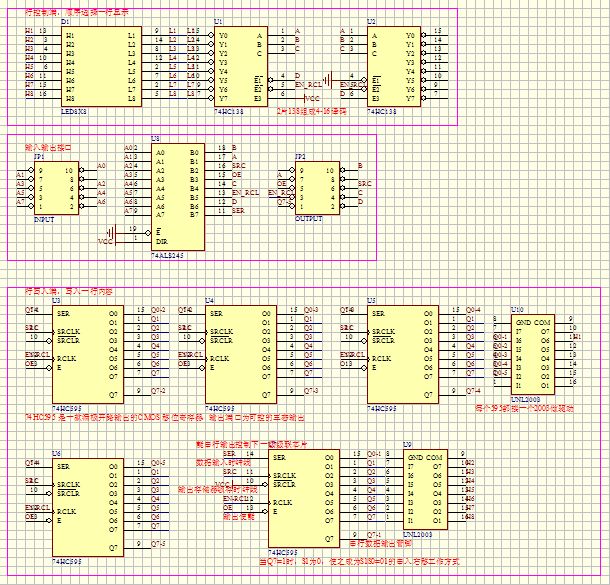
一、 电路原理图。
(1)输入输出口
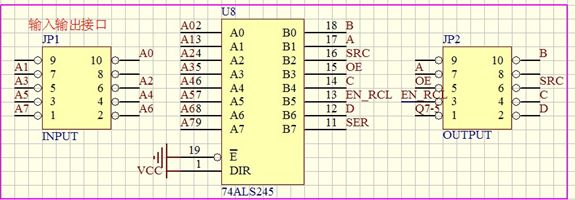
JP1 为输入口,JP2为输出口(为串联下一块点阵),245为电平转换。
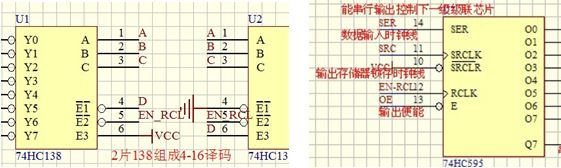
(2)行控制端电路
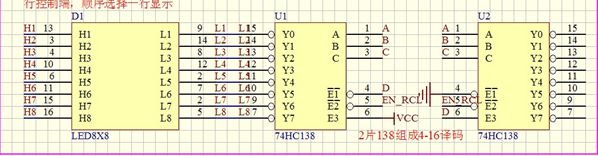
有2块3-8译码器组成4-16译码器。将A,B,C,D,接入一个8位I/O口,直接对I/O口赋值。
(3)行写入端电路
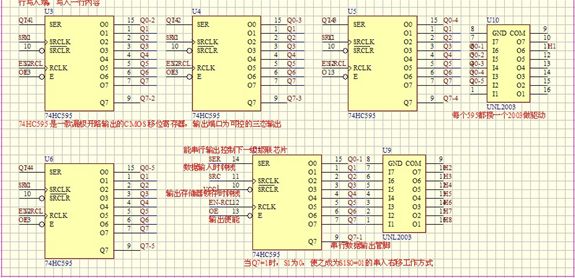
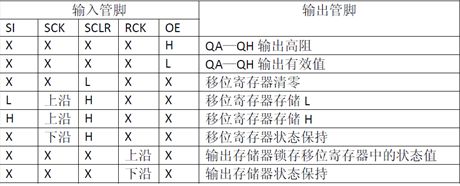
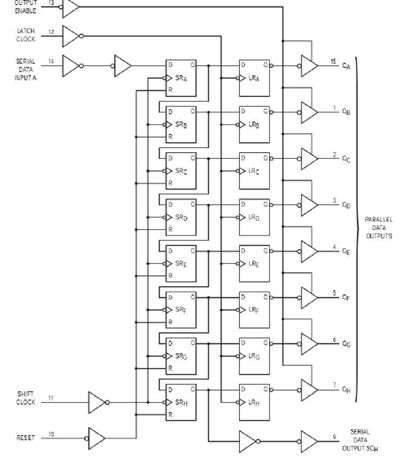
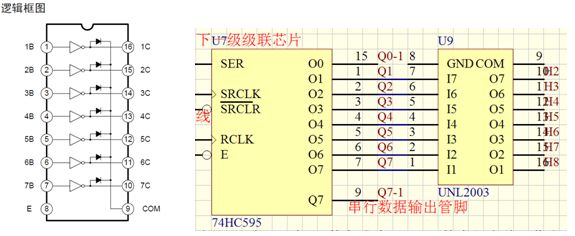
二、74HC595介绍。
74HC595 是一款漏极开路输出的CMOS 移位寄存器,输出端口为可控的三态输出
端,亦能串行输出控制下一级级联芯片。
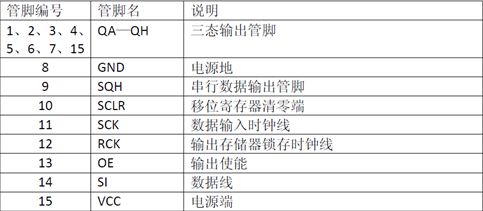
10 脚 SCLR 移位寄存器清零端 直接接地,
11 脚 SCK 数据输入时钟线
12 脚 RCK 输出存储器锁存时钟线
13 脚 OE 输出使能 低电平为输出有效
14 脚 SI 数据线 串行输入数据,亦能串行输出数据到下一级级联芯片
输入数据程序:
1. 向595写一个字节的数据
void write_595(uchar DATA) //向595写一个字节的数据
{
uchar i;
for(i=0;i<8;i++)
{
SI=(~DATA)&0x01;
SCK=1;
SCK=0;
DATA=DATA>>1;
}
}
2.向多个595写一个字节的数据
9 脚SQH 位串行数据输出管脚 将多个595的数据由9脚传至下一个595,全部写入后在打开输出存储器锁存时钟线
for(i=0;i<16;i++) //字从下往上滚动出现
{
k=1;
for(j=i+1;j>0;j--) //向多个595写一个字节的数据
{
write_595(display[7][k]);
write_595(display[7][k-1]);
write_595(display[6][k]);
write_595(display[6][k-1]);
write_595(display[5][k]);
write_595(display[5][k-1]);
write_595(display[4][k]);
write_595(display[4][k-1]);
k+=2;
hang=16-j; //为138输入行控制数据
RCK=1;RCK=0;
}
delay_ms(20);
}
3.595-RCK信号与138的输出使能E2信号为同一信号,故可以相连。
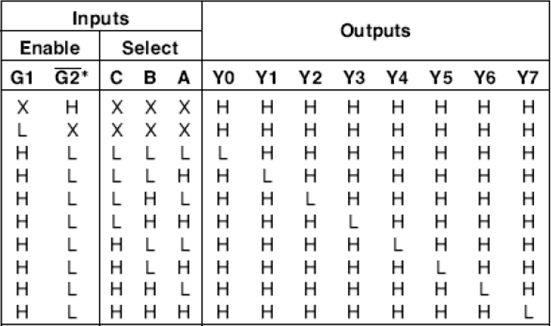
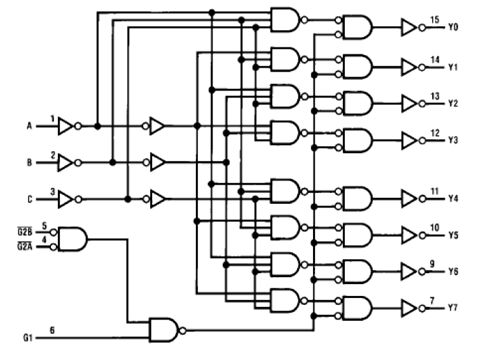
三、74hc138介绍。
3 线-8 线译码器
当一个选通端(G1)为高电平,另两个选通端(/(G2A)和/(G2B))为低电平时,将地址端(A、B、C)的二进制编码在一个对应的输出端以低电平译出。
利用 G1、/(G2A)和/(G2B)可级联扩展成24 线译码器;若外接一个反相器还可级联扩展成32 线译码器。
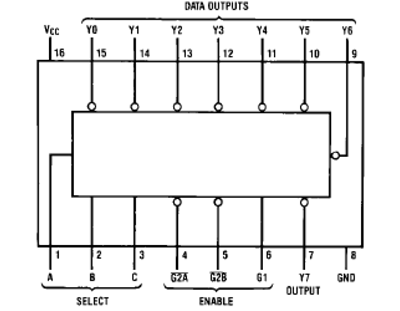
引出端符号:
A、B、C 译码地址输入端
G1 选通端
/(G2A)、/(G2B) 选通端(低电平有效)
Y0~Y7 译码输出端(低电平有效)
功能表:
逻辑图:
四、74hc245介绍。
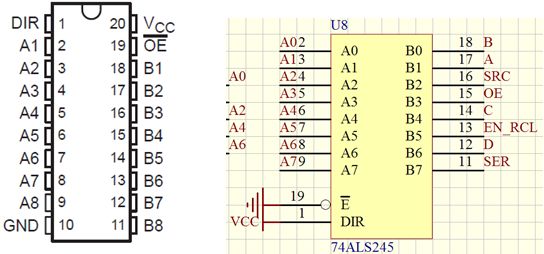
管脚及电路接法。
五、ULN 2003介绍。
ULN2003是一个单片高电压、高电流的达林顿晶体管阵列集成电路。它是由7对NPN达林顿管组成的,它的高电压输出特性和阴极箝位二极管可以转换感应负载。单个达林顿对的集电极电流是500mA。达林顿管并联可以承受更大的电流。此电路主要应用于继电器驱动器,字锤驱动器,灯驱动器,显示驱动器(LED气体放电),线路驱动器和逻辑缓冲器。
74hc595通过ULN2003驱动8*8LED点阵屏。
五、8*8点阵屏介绍
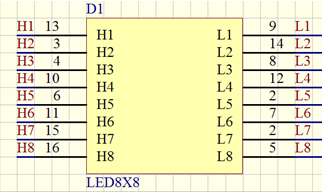
8*8点阵屏管脚如上,L1-L8由达林顿管TIP127驱动,H1-H8有ULN2003驱动
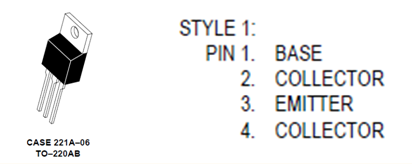
(1)TIP127简介
外延基PNP达林顿功率晶体管,采用TO-220塑料封装
VCBO 集电极-基极电压(IE = 0) 60 80 100 V
VCEO 集电极-发射极电压(IB = 0) 60 80 100 V
VEBO 发射极-基极电压(IC = 0) 5 V
IC 集电极电流 5 A
ICM 集电极峰值电流 8 A
IB 基极电流 0.1 A
Ptot 耗散功率 Tcase≤25℃ 65 W
(2)ULN 2003介绍。
ULN2003是一个单片高电压、高电流的达林顿晶体管阵列集成电路。它是由7对NPN达林顿管组成的,它的高电压输出特性和阴极箝位二极管可以转换感应负载。单个达林顿对的集电极电流是500mA。达林顿管并联可以承受更大的电流。此电路主要应用于继电器驱动器,字锤驱动器,灯驱动器,显示驱动器(LED气体放电),线路驱动器和逻辑缓冲器。

74hc595通过ULN2003驱动8*8LED点阵屏。
附录:原理图
源程序:
//16x64点阵程序及滚动效果视频
#include
#define uchar unsigned char
#define uint unsigned int
#define hang P1 //行扫描接在P1口
sbit SI=P2^3;
sbit SCK=P2^0;
sbit OE=P2^2;
sbit RCK=P2^1;
uint counter;
uchar flag;
void delay_ms(uchar z) //延时0.5秒
{
uchar i,j;
for(i=z;i>0;i--)
for(j=120;j>0;j--);
}
uchar code display[][32]={
/*-- 文字: 好 --*/
/*-- 宋体12; 此字体下对应的点阵为:宽x高=16x16 --*/
0x10,0x00,0x11,0xFC,0x10,0x08,0x10,0x10,0xFC,0x20,0x24,0x20,0x24,0x20,0x27,0xFE,0x44,0x20,0x64,0x20,0x18,0x20,0x08,0x20,0x14,0x20,0x26,0x20,0x44,0xA0,0x80,0x40,
/*-- 文字: 好 --*/
/*-- 宋体12; 此字体下对应的点阵为:宽x高=16x16 --*/
0x10,0x00,0x11,0xFC,0x10,0x08,0x10,0x10,0xFC,0x20,0x24,0x20,0x24,0x20,0x27,0xFE,0x44,0x20,0x64,0x20,0x18,0x20,0x08,0x20,0x14,0x20,0x26,0x20,0x44,0xA0,0x80,0x40,
/*-- 文字: 学 --*/
/*-- 宋体12; 此字体下对应的点阵为:宽x高=16x16 --*/
0x01,0x08,0x10,0x8C,0x0C,0xC8,0x08,0x90,0x7F,0xFE,0x40,0x04,0x8F,0xE8,0x00,0x40,0x00,0x80,0x7F,0xFE,0x00,0x80,0x00,0x80,0x00,0x80,0x00,0x80,0x02,0x80,0x01,0x00,
/*-- 文字: 习 --*/
/*-- 宋体12; 此字体下对应的点阵为:宽x高=16x16 --*/
0x00,0x00,0x3F,0xFC,0x00,0x04,0x08,0x04,0x04,0x04,0x03,0x04,0x01,0x14,0x00,0x64,0x01,0x84,0x06,0x04,0x38,0x04,0x10,0x04,0x00,0x04,0x00,0x24,0x00,0x14,0x00,0x00,
/*-- 文字: 天 --*/
/*-- 宋体12; 此字体下对应的点阵为:宽x高=16x16 --*/
0x00,0x08,0x7F,0xFC,0x01,0x00,0x01,0x00,0x01,0x00,0x01,0x04,0xFF,0xFE,0x01,0x00,0x02,0x80,0x02,0x80,0x04,0x40,0x04,0x40,0x08,0x20,0x10,0x10,0x20,0x0E,0xC0,0x04,
/*-- 文字: 天 --*/
/*-- 宋体12; 此字体下对应的点阵为:宽x高=16x16 --*/
0x00,0x08,0x7F,0xFC,0x01,0x00,0x01,0x00,0x01,0x00,0x01,0x04,0xFF,0xFE,0x01,0x00,0x02,0x80,0x02,0x80,0x04,0x40,0x04,0x40,0x08,0x20,0x10,0x10,0x20,0x0E,0xC0,0x04,
/*-- 文字: 向 --*/
/*-- 宋体12; 此字体下对应的点阵为:宽x高=16x16 --*/
0x02,0x00,0x04,0x00,0x08,0x04,0x7F,0xFE,0x40,0x04,0x40,0x24,0x4F,0xF4,0x48,0x24,0x48,0x24,0x48,0x24,0x48,0x24,0x4F,0xE4,0x48,0x24,0x40,0x04,0x40,0x14,0x40,0x08,
/*-- 文字: 上 --*/
/*-- 宋体12; 此字体下对应的点阵为:宽x高=16x16 --*/
0x01,0x00,0x01,0x00,0x01,0x00,0x01,0x00,0x01,0x10,0x01,0xF8,0x01,0x00,0x01,0x00,0x01,0x00,0x01,0x00,0x01,0x00,0x01,0x00,0x01,0x00,0x01,0x04,0xFF,0xFE,0x00,0x00};
void write_595(uchar DATA) //向595写一个字节的数据
{
uchar i;
for(i=0;i<8;i++)
{
SI=(~DATA)&0x01;
SCK=1;
SCK=0;
DATA=DATA>>1;
}
}
void main() //主函数
{
uchar i,j,k;
OE=0; //154使能
EA=1; //开总中断
TMOD=0x01; //定时器0工作方式0
ET0=1; //定时器0使能
TH0=(65535-50000)/256; //定时器0设置初值
TL0=(65536-50000)%256;
while(1)
{
for(i=0;i<16;i++) //字从下往上滚动出现
{
k=1;
for(j=i+1;j>0;j--) //向多个595写一个字节的数据
{
write_595(display[7][k]);
write_595(display[7][k-1]);
write_595(display[6][k]);
write_595(display[6][k-1]);
write_595(display[5][k]);
write_595(display[5][k-1]);
write_595(display[4][k]);
write_595(display[4][k-1]);
k+=2;
hang=16-j;
RCK=1;RCK=0;
}
delay_ms(20);
}
TR0=1;flag=1;
while(flag) //停留一秒
{
uchar j;
for(j=0;j<16;j++)
{
write_595(display[7][j*2+1]);
write_595(display[7][j*2]);
write_595(display[6][j*2+1]);
write_595(display[6][j*2]);
write_595(display[5][j*2+1]);
write_595(display[5][j*2]);
write_595(display[4][j*2+1]);
write_595(display[4][j*2]);
hang=j;
RCK=1;RCK=0;
}
}
TR0=0;
for(i=16;i>0;i--) //字滚动出显示区
{
k=31;
for(j=i-1;j>0;j--)
{
write_595(display[7][k]);
write_595(display[7][k-1]);
write_595(display[6][k]);
write_595(display[6][k-1]);
write_595(display[5][k]);
write_595(display[5][k-1]);
write_595(display[4][k]);
write_595(display[4][k-1]);
k-=2;
hang=j;
RCK=1;RCK=0;
}
delay_ms(20);
}
for(i=0;i<16;i++) //下四个字滚动出现在显示区
{
k=1;
for(j=i+1;j>0;j--)
{
write_595(display[3][k]);
write_595(display[3][k-1]);
write_595(display[2][k]);
write_595(display[2][k-1]);
write_595(display[1][k]);
write_595(display[1][k-1]);
write_595(display[0][k]);
write_595(display[0][k-1]);
k+=2;
hang=16-j;
RCK=1;RCK=0;
}
delay_ms(20);
}
TR0=1;flag=1;
while(flag) //停留一秒
{
uchar j;
for(j=0;j<16;j++)
{
write_595(display[3][j*2+1]);
write_595(display[3][j*2]);
write_595(display[2][j*2+1]);
write_595(display[2][j*2]);
write_595(display[1][j*2+1]);
write_595(display[1][j*2]);
write_595(display[0][j*2+1]);
write_595(display[0][j*2]);
hang=j;
RCK=1;RCK=0;
}
}
TR0=0;
for(i=16;i>0;i--) //滚出显示区
{
k=31;
for(j=i-1;j>0;j--)
{
write_595(display[3][k]);
write_595(display[3][k-1]);
write_595(display[2][k]);
write_595(display[2][k-1]);
write_595(display[1][k]);
write_595(display[1][k-1]);
write_595(display[0][k]);
write_595(display[0][k-1]);
k-=2;
hang=j;
RCK=1;RCK=0;
}
delay_ms(20);
}
}
}
void timer0() interrupt 1 //中断函数
{
counter++;
if(counter==20) //1秒设置
{
counter=0;
flag=0;
}
TH0=(65535-50000)/256;
TL0=(65536-50000)%256;
}
-
74HC595输出端可以直接接到ULN2003的输入端口吗2013-01-08 0
-
挽救一下小虾们脆弱的心吧,74HC595驱动LED点阵方面2013-08-11 0
-
求助,用protues仿真uln2003出现问题了。2017-10-15 0
-
74HC595驱动LED点阵或数码管的正确用法 精选资料推荐2021-07-22 0
-
74HC595芯片的作用是什么2021-07-22 0
-
电子设计教程49:16*16LED点阵屏驱动-74HC595的原理 精选资料推荐2021-07-23 0
-
74HC595驱动LED点阵或数码管的正确用法是什么?2021-07-23 0
-
怎样去设计一种8×8LED点阵屏电路2021-08-06 0
-
如何使用三片74HC595对一个8X8双色点阵进行控制呢2021-10-25 0
-
如何通过74HC595和74HC138实现LED点阵的显示2021-12-07 0
-
使用移位寄存器74HC595和ULN2003的7段屏蔽2,3英寸2022-09-09 0
-
74HC595驱动8个LED电路2010-02-25 7766
-
基于单片机实现74HC595通过ULN2003驱动2路步进电机2016-01-06 2936
-
基于单片机74HC595去驱动点阵2016-01-06 1654
-
7段屏蔽使用移位寄存器74HC595和ULN20032022-08-18 499
全部0条评论

快来发表一下你的评论吧 !
