

谷歌最新研究:低成本内向外6Dof VR控制器追踪系统
电子说
描述
前几日发布的Oculus Go主打经济实惠性价比,低配版仅千把出头的售价也让他成为了名副其实的“千元机”。但是Oculus Go仅支持手部三维自由度,带上Oculus Go的我们也只能在原地“站桩输出”,无法展示自己灵活的手法,沉浸感是大打折扣。
和大部分VR显示器一样,Oculus Go不具备6Dof追踪的原因是出于成本考量,倘若Oculus Go实惠的售价再配上6Dof不菲的成本,恐怕厂商是要血亏一波。
截至目前位置6Dof仍然是是高端头显的特有功能,然而最近谷歌研究的低成本内向外6Dof VR控制器追踪系统可能会令6Dof头显搭配6Dof控制器以更实惠的价格走入寻常百姓家。
正如谷歌所说,许多头显缺乏6Dof控制跟踪器的原因就在于硬件成本、计算成本以及遮挡问题。倘若解决如上三个问题,便能够降低成本,普及技术。
为了解决其中的遮挡问题,谷歌采用了利用一对立体单色鱼眼相机跟踪用户的手臂的办法,确定控制器在图像中的位置,简化系统。
“用户的双手和手臂为控制器在图像中的位置提供了很好的参考,”Google研究人员写道,
“即使控制器被手遮挡住,也可以通过对手部轮廓图像的分析得到控制器的位置。而且除了基于标准IMU的控制器之外,并不需要额外的硬件设备。”
简单来说,就是通过VR头显摄像头捕捉手部和手臂各式各样的姿势,然后用“经验丰富”的软件对这些手势进行识别。
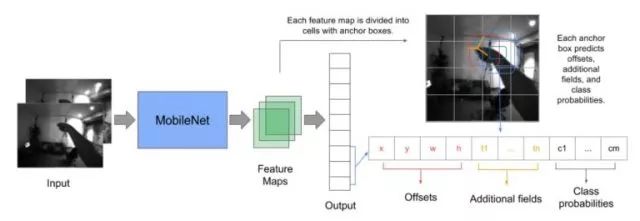
为了提高识别精度,识别软件必须训练有素。研究人员为了这项工作以无标记6-DoF注释控制器姿态收集了超过54万对立体鱼眼图像的头显控制器数据集。 这些6-DoF注释都是是使用Vicon动作捕捉系统自动收集的,具有亚毫米级的高精度。以此来训练神经网络,检测图像,并且推断控制器的位置。
在从数据集中学习之后,该算法可以通过实时反馈的图像”猜测“控制器的位置,来自控制器的IMU数据与算法的位置确定也将提高它猜测的准确性。
这个数据集涵盖了多种用户群和具有挑战性的环境,就目前来看,应该是同类型中最大的数据集。研究人员已经证明,他们的的SSD-AF-Stereo3D模型在数据集的3D关键点追踪中实现了33.5mm的低位置误差。它可以以每秒30帧的速度在单个移动CPU内核上运行。可以说兼具了准确性和流畅性。
随着这个方法的进一步改善,未来更多配备IMU控制器的头显将会具备这一功能,并且研究方有信心在未来将能够支持无手动控制器的手动追踪,彻底解放双手。
实际上跟踪控制器位置的方法在Oculus的Santa Cruz上也有用到。
Santa Cruz使用摄像头寻找隐藏在控制器内部的IR LED标志,然后将标记的形状与已知形状进行比较以获得控制器的位置。
Google拿出的方案区别在于直接追踪用户手臂,而不是发光标记。以此来推断控制器位置。
Google的该团队表示目前方案还有进步空间,当前的模式是在逐帧的基础上预测位置,而不是在帧与帧之间共享信息,所以他们计划把帧之间的插值作为下一步方向,从而显著加快追踪速度。
-
一文详解VR和6DoF设计原则2018-06-18 8421
-
Antilatency的技术,1.5小时即可将Oculus Go变身为一台6DoF VR一体机2018-06-07 1721
-
谷歌披露了在实验6DoF控制器方面的工作,以及在VR平台的进展2018-10-01 573
-
Oculus新头显Oculus Quest,一款支持头部和手柄6DoF追踪的中端VR产品2018-09-29 1577
-
HTC正式发布6DoF控制器,目前只提供开发者套件申请2018-10-22 1397
-
Antilatency推出针对Oculus Go的VR外设 使其能够提供6DoF追踪2019-01-15 462
-
AR/VR“新势力”崛起!自动驾驶“风头更劲”!2019-03-26 2440
-
6DOF追踪的进化:从标识追踪到SLAM定位,带给AR体验质的飞越2019-05-08 9331
-
在VR领域中眼动追踪技术有着广泛的应用2019-09-26 3787
-
Pico Neo 2 VR一体机亮相CES 6DoF追踪技术提升了游戏体验2020-01-10 770
-
6DoF VR一体机Neo 2即将发售 主打VR游戏体验2020-03-03 719
-
CES2020期间NOLO VR推出6DoF Cloud VR解决方案2020-03-07 3093
-
Facebook为挑战性环境优化6DoF控制器追踪2020-07-25 602
-
爱奇艺正式发布国内首个头手6DoF VR交互技术2021-01-07 2249
-
趣立科技发布新一代6DoF VR参考设计样机——“骐骥2021-09-28 1375
全部0条评论

快来发表一下你的评论吧 !
