

机器人离线编程与机器人编程趋势
电子说
描述
工业机器人的应用极大地提高了工厂的生产效率,在帮助企业应对人工成本上涨、劳动力供给不足等方面提供了可供选择的方式,赢得了企业的广泛关注。目前,机器人广泛应用于焊接、装配、搬运、喷漆、打磨等领域。
目前常用的编程方式有两种:一种是示教编程,一种是离线编程。离线编程因为相对于示教编程具有许多优势,应用范围日趋广泛。
协作机器人示教编程
需要实际机器人系统和工作环境
编程时机器人停止工作
在实际系统上试验程序
编程的质量取决于编程者的经验
难以实现复杂的机器人运行轨迹
机器人离线编程
离线编程特点:
需要机器人系统和工作环境的图形模型
编程时不影响机器人工作
通过仿真试验程序
可用CAD方法进行最佳轨迹规划
可实现复杂运行轨迹的编程
1.离线编程优点
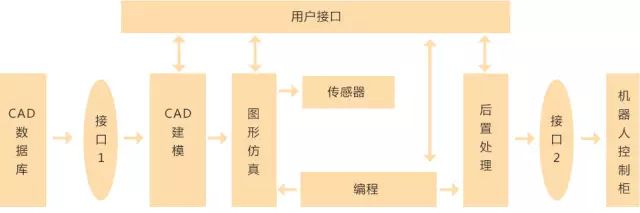
2. 离线编程系统构成
一般说来,机器人离线编程系统包括以下一些主要模块:传感器、机器人系统CAD建模、离线编程、图形仿真、人机界面以及后置处理等。如图所示:
3. 离线编程关键技术
机器人离线编程系统正朝着集成的方向前进,其中包含了多个领域中的多个学科,为推动这项技术的进一步发展,以下几个方面的技术是关键:
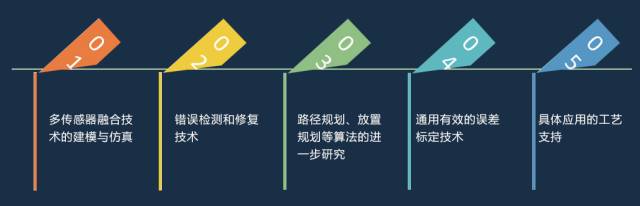
多传感器融合技术的建模与仿真。随着机器人智能化的提高,传感器技术在机器人系统中的应用越来越重要。因而需要在离线编程系统中对多传感器进行建模,实现多传感器的通讯,执行基于多传感器的操作。
错误检测和修复技术。系统执行过程中发生错误是难免的,应对系统的运行状态进行检测以监视错误的发生,并采用相应的修复技术。
各种规划算法的进一步研究,其包括路径规划、放置规划和微动规划等。规划一方面要考虑到环境的复杂性、连续性和不确定性,另一方面又要充分注意计算的复杂性。
通用有效的误差标定技术,以应用于各种实际应用场合的机器人的标定。
具体应用的工艺支持。如弧焊,作为离线编程应用比较困难的领域,不止是姿态、轨迹的问题,而且需要更多的工艺方面的研究以及相应的专家系统。
4. 离线编程误差
第一种是外部误差,包括机器人和工装的安装误差,工装的加工误差等。
第二种是内部误差,即机器人本体在加工制造时产生的误差。
减小误差方式:
安装误差校准
Motocalv进行安装误差校准的原理是在仿真软件中工件的三个特征位置生成一个三点程序,然后在现场工件上同样三个位置生成一个三点程序,程序点顺序和软件中相同。通过这两个程序、机器人系统参数和工具尖端点数据,可计算得到现场和软件中工件与机器人相对位置差值。用这个差值去补偿离线程序,缩小偏差。
这种方法需要到现场示教校准程序,遁入电脑,计算误差,补偿离线程序之后再遁入机器人,操作步骤较多,比较麻烦
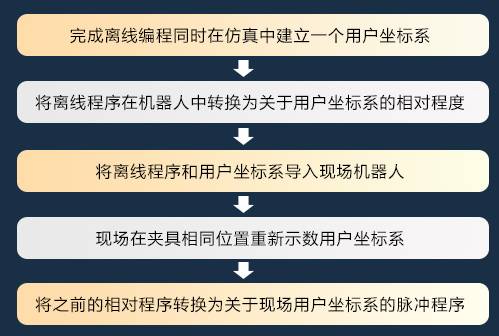
用户坐标系校准法
5.离线编程软件应用领域
6.离线编程主流厂商
7.机器人编程趋势
随着视觉技术、传感技术,智能控制,网络和信息技术以及大数据等技术的发展,未来的机器人编程技术将会发生根本的变革,主要表现在以下几个方面:
①编程将会变得简单、快速、可视、模拟和仿真立等可见。
②基于视觉、传感,信息和大数据技术,感知、辨识、重构环境和工件等的CAD模型,自动获取加工路径的几何信息。
③基于互联网技术实现编程的网络化、远程化、可视化。
④基于增强现实技术实现离线编程和真实场景的互动。
⑤根据离线编程技术和现场获取的几何信息自主规划加工路径、焊接参数并进行仿真确认。
总之,在不远的将来,传统的在线示教编程将只在很少的场合得到应用,比如空间探索、水下、核电等,而离线编程技术将会得到进一步发展,并与CAD/CAM、视觉技术、传感技术,互联网、大数据、增强现实等技术深度融合,自动感知、辨识和重构工件和加工路径等,实现路径的自主规划,自动纠偏和自适应环境。
-
什么是工业机器人2015-01-19 0
-
机器人视觉——机器人的“眼睛”2015-01-23 0
-
自己开发的机器人图形化编程软件2016-07-02 0
-
工业机器人的技术原理2018-11-23 0
-
多轴机器人的发展趋势2020-07-29 0
-
雅马哈机器人编程手册2021-02-04 0
-
喷涂机器人的发展趋势2021-03-10 0
-
工业机器人应用编程考核设备分享2021-07-01 0
-
FANUC 工业机器人编程与联网相关资料推荐2021-07-02 0
-
了解机器人仿真软件编程界面和运行环境2021-09-01 0
-
机器人与编程的区别2021-09-01 0
-
工业机器人仿真与编程2021-09-07 0
-
Motoman机器人离线编程2021-09-07 0
-
机器人是什么?2022-03-31 0
-
机器人编程需要什么软件?2023-11-01 0
全部0条评论

快来发表一下你的评论吧 !
