

一文看懂步进电机和舵机及伺服电机的区别
电子常识
描述
一、步进电机和舵机及伺服电机的区别
步进电机:是将电脉冲信号转变为角位移或线位移的开环控制元步进电机件。简单的说是靠电脉冲信号来控制角度与转动圈数。所以说他只靠脉冲信号来决定转动多少。因没有传感器,所以停止角度会有偏差。但是精确的脉冲信号则会将偏差减至最低。
伺服电机:靠伺服控制电路来控制电机的转速,通过传感器来控制转动位置。所以位置控制十分精确。而转速也是可变的。
舵机(电子舵机):舵机的主要组成部分为伺服电机。其中包含伺服电机控制电路+减速齿轮组。哦,对了,伺服电机没有减速齿轮组。而舵机有减速齿轮组。
如果是限位舵机,靠输出轴下面的电位器来确定舵臂转向角度。舵机信号控制是一种脉宽调制(PWM)信号,凡是微控制器能轻松的产生这种信号。
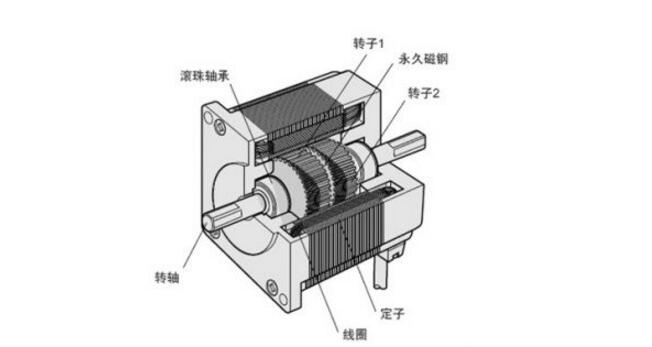
二、步进电机基本原理
工作原理:
通常电机的转子为永磁体,当电流流过定子绕组时,定子绕组产生一矢量磁场。该磁场会带动转子旋转一角度,使得转子的一对磁场方向与定子的磁场方向一致。当定子的矢量磁场旋转一个角度。转子也随着该磁场转一个角度。每输入一个电脉冲,电动机转动一个角度前进一步。它输出的角位移与输入的脉冲数成正比、转速与脉冲频率成正比。改变绕组通电的顺序,电机就会反转。所以可用控制脉冲数量、频率及电动机各相绕组的通电顺序来控制步进电机的转动。
发热原理:
通常见到的各类电机,内部都是有铁芯和绕组线圈的。绕组有电阻,通电会产生损耗,损耗大小与电阻和电流的平方成正比,这就是我们常说的铜损,如果电流不是标准的直流或正弦波,还会产生谐波损耗;铁心有磁滞涡流效应,在交变磁场中也会产生损耗,其大小与材料,电流,频率,电压有关,这叫铁损。铜损和铁损都会以发热的形式表现出来,从而影响电机的效率。步进电机一般追求定位精度和力矩输出,效率比较低,电流一般比较大,且谐波成分高,电流交变的频率也随转速而变化,因而步进电机普遍存在发热情况,且情况比一般交流电机严重。
三、舵机的构造
舵机主要是由外壳、电路板、驱动马达、减速器与位置检测元件所构成。其工作原理是由接收机发出讯号给舵机,经由电路板上的 IC驱动无核心马达开始转动,透过减速齿轮将动力传至摆臂,同时由位置检测器送回讯号,判断是否已经到达定位。位置检测器其实就是可变电阻,当舵机转动时电阻值也会随之改变,藉由检测电阻值便可知转动的角度。一般的伺服马达是将细铜线缠绕在三极转子上,当电流流经线圈时便会产生磁场,与转子外围的磁铁产生排斥作用,进而产生转动的作用力。依据物理学原理,物体的转动惯量与质量成正比,因此要转动质量愈大的物体,所需的作用力也愈大。舵机为求转速快、耗电小,于是将细铜线缠绕成极薄的中空圆柱体,形成一个重量极轻的无极中空转子,并将磁铁置於圆柱体内,这就是空心杯马达。
为了适合不同的工作环境,有防水及防尘设计的舵机;并且因应不同的负载需求,舵机的齿轮有塑胶及金属之区分,金属齿轮的舵机一般皆为大扭力及高速型,具有齿轮不会因负载过大而崩牙的优点。较高级的舵机会装置滚珠轴承,使得转动时能更轻快精准。滚珠轴承有一颗及二颗的区别,当然是二颗的比较好。目前新推出的 FET 舵机,主要是采用 FET(Field Effect Transistor)场效电晶体。FET 具有内阻低的优点,因此电流损耗比一般电晶体少。
四、舵机工作原理
由pwm波进入内部电路产生一个偏置电压,触发电机通过减速齿轮带动电位器移动,使电压差为零时,电机停转,从而达到伺服的效果。
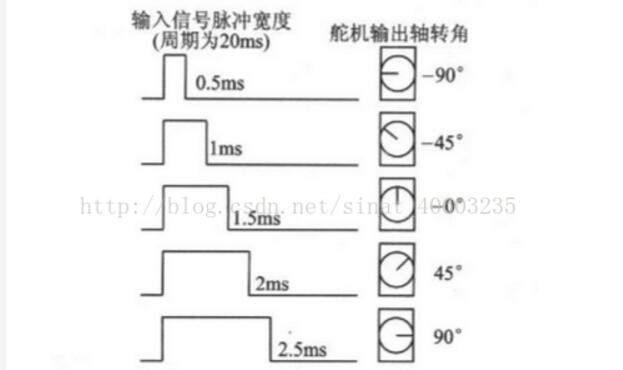
舵机PWM的协议都是相同的,但最新出现的舵机可能不一样
协议一般为:高电平宽度在0.5ms~2.5ms控制舵机转过不同的角度
例如某一型号如下:
对于不同的型号可以查找相关的舵机文档
分析:
在此以工作频率为50HZ,即周期为20MS的futaba s3003舵机,和51单片机为主控芯片进行详细程序编写分析:
有上图可知:不同宽度的脉冲可以产生不同的角度输出,可以利用定时器和IO口模拟产生PWM波,通过定时控制占空比从而达到角度的控制,理论上计算51可以产生us级别的脉冲,180/2000us=0.09,可以达到0.1左右的精度。
五、伺服电机的工作原理
如下图所示是一种采用功率运算放大器LM675制成的伺服电动机控制电路,电动机采用直流伺服电动机。从图可见,功率运算放大器LM675由15V供电,15V电压经RP 1加到运算放大器LM675的同相输入端,LM675的输出电压加到伺服电动机的输入端。电动机上装有测速信号产生器,用于实时检测电动机的转速。实际上测速信号产生器是一种发电机,它输出的电压与转速成正比。测速信号产生器G输出的电压经分压电路后作为速度误差信号反馈到运算放大器的反相输入端。速度指令电位器RP1设定的电压值经R1.R2分压后加到运算放大器的同相输入端,相当于基准电压。
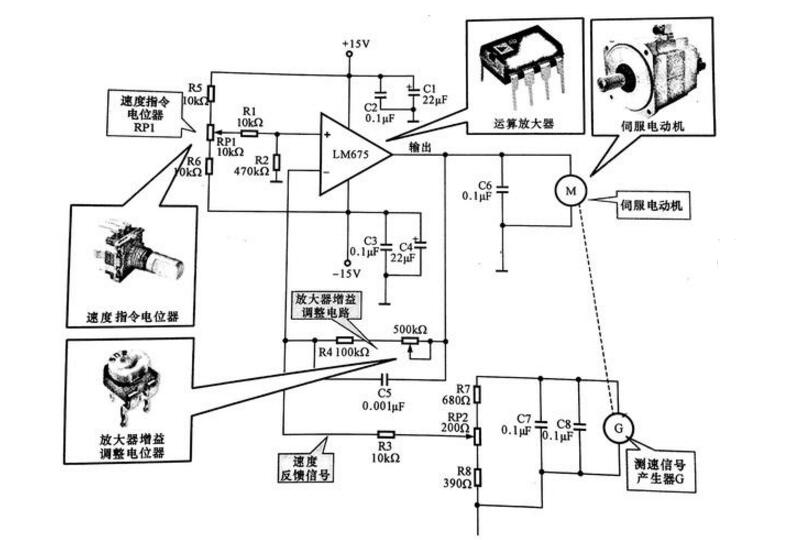
伺服电动机的控制原理图
伺服电动机用字母M表示伺服电动机,是驱动系统的动力之源。运算放大器:用电路名称表示,即LM675,是伺服控制电路中的放大器件,为伺服电动机提供驱动电流。
速度指令电位器RP1:在电路中设定运算放大器的基准电压,即速度设定。放大器增益调整电位器RP2:在电路中分别用于微调放大器的增益和速度反馈信号的大小。
当电动机的负载发生变动时,反馈到运算放大器反相输入端的电压也会发生变化,即电动机负载加重时,速度会降低,测速信号产生器的输出电压也会降低,使运算放大器反相输入端的电压降低,该电压与基准电压之差增加,运算放大器的输出电压增加。反之,当负载变小、电动机速度增加时,测速信号产生器的输出电压上升,加到运算放大器反相输入端的反馈电压增加,该电压与基准电压之差减小,运算放大器的输出电压下降,会使电动机的速度随之下降,从而使转速能自动稳定在设定值。
-
精辟!伺服电机、舵机、步进电机的区别2016-01-07 0
-
步进电机、伺服电机、舵机的原理和区别2021-06-28 0
-
伺服电机、舵机、步进电机的区别是什么2021-06-28 0
-
步进电机、伺服电机和舵机相关资料分享2021-06-28 0
-
步进电机/伺服电机/舵机有什么区别?2021-09-26 0
-
步进电机、伺服电机与舵机有哪些区别2021-09-28 0
-
步进电机、伺服电机和舵机的区别在哪2021-10-08 0
-
请问步进电机/舵机/伺服电机的区别?2023-06-19 0
-
伺服电机步进电机区别2010-01-09 35788
-
舵机和伺服电机有什么区别2018-05-11 71867
-
步进电机和伺服电机有什么区别2020-09-25 6091
-
伺服电机和步进电机有什么区别?2021-07-19 38443
-
步进电机与直流电机的优缺点及与伺服电机区别2023-03-09 472
-
舵机对比伺服电机,步进电机有哪些优点?2023-09-19 1410
全部0条评论

快来发表一下你的评论吧 !
