

无人车为什么需要高精度的定位系统?
电子说
描述
按定位技术原理不同可分为三类。第一类,基于信号的定位,代表就是GNSS定位,即全球导航卫星系统;第二类,航迹推算,依靠IMU等,根据上一时刻的位置和方位推断现在的位置和方位;第三类是环境特征匹配,基于LiDAR的定位,用观测到的特征和数据库中的特征和存储的特征进行匹配,得到现在车的位置和姿态。
无人车为什么需要高精度的定位系统?
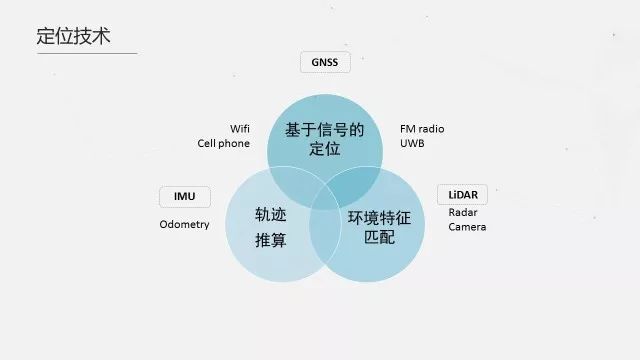
对于无人驾驶而言,位置和姿态用于路径规划和车辆控制,高精度和高鲁棒性的定位系统至关重要。我们先来了解一下不同的定位类型,以百度Apollo多传感器融合定位为例,其包含三类定位技术:
智能驾驶的三类定位定姿技术
按定位技术原理不同可分为三类。第一类,基于信号的定位,代表就是GNSS定位,即全球导航卫星系统;第二类,航迹推算,依靠IMU等,根据上一时刻的位置和方位推断现在的位置和方位;第三类是环境特征匹配,基于LiDAR的定位,用观测到的特征和数据库中的特征和存储的特征进行匹配,得到现在车的位置和姿态。
三类定位技术各有优劣,第一类GNSS定位,通过GNSS信号接收完成定位,优点是全球、全天候、全天时高精度厘米级定位,缺点是依赖可视卫星颗数、易受电磁环境干扰、多路径效应等影响;第二类惯性定位,利用惯性测量单元(陀螺仪和加速度计)测量得到载体相对于惯性空间角运动和线运动参数,并通过惯性导航解算得到载体速度、位置、姿态,优点是输出频率非常高(大于100Hz),短时精度高,缺点是误差随着时间累积,且高性能IMU价格昂贵;第三类点云定位,激光点云定位需要预先制作地图,然后用实时点云和地图进行匹配,来计算激光雷达的位置和姿态,再通过激光雷达与IMU之间的外参,得到IMU的位置和姿态,优点是在没有GNSS情况下也可以工作,鲁棒性比较好,缺点是需要预先制作地图同时要定期更新地图(环境会发生变化),雨雪天气也会受到影响(折射较多,回收点云数据变少)。
百度Apollo2.0多传感器融合的定位系统

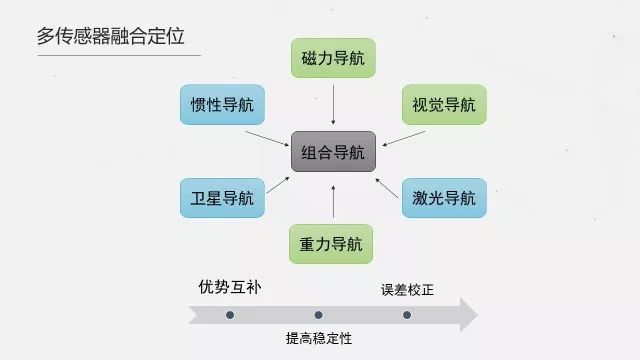
基于以上三种定位技术,百度提出了多传感器融合的定位系统,既做到优势互补,也提高了稳定性并增强了定位精度。
(图片来源于网络)
上图为百度无人车,其GNSS定位和惯性测量单元都由NovAtel提供, IMU 为NovAtel IMU-IGM-A1 ,GNSS接收机为NovAtel ProPak6,构成 NovAtel SPAN-IGM-A1分体式组合导航系统,能够以最高 200Hz 的频率,输出实时的高精度、高可靠的三维位置、速度、姿态信息,作为Apollo推荐的参考硬件单元。
NovAtel SPAN组合导航系统有三大优势技术,非常适合智能驾驶应用。
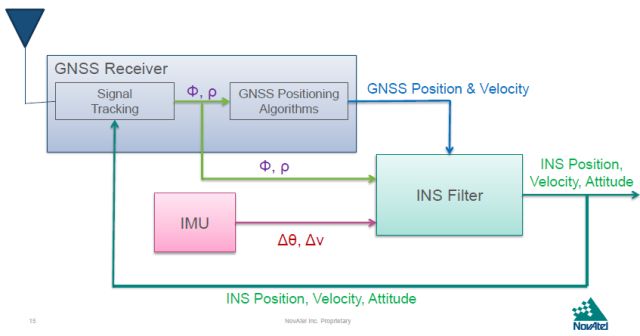
SPAN® 技术
SPAN® 技术是 NovAtel 公司推出的高精度 GNSS 和 IMU 深耦合组合导航技术,通过 GNSS 卫星导航技术和 INS 惯性导航技术的相互补充,既能保证在小于 4 颗卫星信号时,利用 INS 数据持续地得到高精度的位置、速度和姿态信息,也能保证在 INS 系统误差变大的情况下,利用 GNSS 数据对 INS 系统进行修正,以持续输出高精度的位置信息和姿态信息。
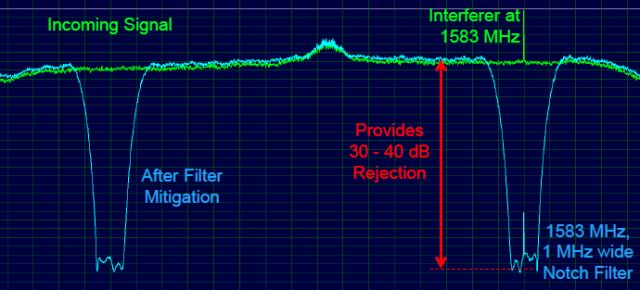
Interference Toolkit(ITK)
Interference Toolkit(ITK)是NovAtel OEM7新推出的干扰抑制技术,当下复杂的电磁环境或其他电子设备易对GNSS信号产生干扰,ITK技术利用监视器和滤波算法,可有效量化和剔除干扰信号,避免导航解算性能受到影响。
NovAtel PwrPak7D-E1一体式
MEMS 组合导航系统
NovAtel PwrPak7D-E1一体式 MEMS 组合导航系统,采用SPAN深耦合组合导航算法,支持SPAN Land Vehicle陆地车辆技术,支持ITK干扰抑制技术,555个GNSS信号跟踪通道,支持GPS、Glonass、北斗、Gaileo全系统多频解算,支持RTK和Terrastar星站差分技术,内置WiFi和16GB存储,支持双天线和轮速传感器功能,具有丰富的通讯接口,串口、USB、CAN、以太网等,易于客户安装集成。
SPAN Land Vehicle陆地车辆技术
SPAN Land Vehicle陆地车辆技术是NovAtel OEM7代产品在SPAN技术基础上,利用车辆运动模型和专利天线相位检测技术,针对智能驾驶等地面轮式车辆应用中低速、城市峡谷、长期失锁等场景进行了大量优化,显著提升导航性能,满足高精度定位要求的同时,通过算法提升来降低系统对IMU器件精度的要求,适合智能驾驶降成本的发展趋势。
-
高精度人员定位系统2012-05-07 0
-
低成本高精度定位方案是未来市场趋势,基于uwb高精度定位的案例分析2018-11-09 0
-
智慧分拣高精度定位管理系统2018-11-29 0
-
FPGA电源需要高精度的理由2018-12-04 0
-
UWB高精度厘米级定位方案2018-12-14 0
-
UWB高精度定位技术原理与应用分析2020-08-28 0
-
UWB高精度定位在自动驾驶中的应用前景2020-10-26 0
-
毕设,基于北斗的高精度无人值守接收机2020-12-24 0
-
无人车传感器 IMU与GPS数据融合进行定位机制 精选资料推荐2021-08-18 0
-
什么是高精度地图2023-10-07 0
-
高精度定位模块之RTK定位模块的应用分析2020-10-14 3434
-
关于三款高精度定位模块的详细介绍2020-10-14 6679
-
为什么4S店需要高精度定位系统2022-01-26 428
-
Aigtek:为什么需要高精度电流源2024-03-27 123
全部0条评论

快来发表一下你的评论吧 !
