

自动驾驶Intel Inside时代来临?
电子说
描述
英特尔变了。从PC Intel Inside到自动驾驶Intel Inside,现在的它更像是一个自动驾驶与智能网联汽车推手,中国,成英特尔策源地。
5月30日,英特尔宣布成立英特尔智能网联汽车大学合作研究中心(ICRI-IACV,Intel Collaborative Research Institute on Intelligent and Automated Connected Vehicles),面向自动驾驶展开深入研究,加速技术的落地,同时,英特尔与清华大学、中国科学院自动化研究所签署合作协议,共同推动自动驾驶汽车相关课题的研究,为中国自动驾驶、智能网联汽车产业的研发创新提供强有力的技术支撑。
这是英特尔智能网联汽车大学合作研究中心推出的首项合作计划,根据合作协议,各方将围绕创新性的车联网应用以及平行驾驶等领域展开联合研究。
英特尔智能网联汽车大学合作研究中心由英特尔研究院发起建立,是英特尔大学联合研究中心的重要组成部分,并与全球最优秀的大学和科研机构合作,针对关键的前沿技术领域展开持续的研究。
目前,针对可视计算中心、移动网络通信中心等不同的研究领域,ICRI已在美国、中国、欧洲等国家和地区设立了多个研究分支,引领全球前沿科技的创新。
为了支持中国智能网联汽车的创新发展,英特尔智能网联汽车大学合作研究中心提出五大研究方向:
1)自动驾驶汽车安全性;
2)自动驾驶的人机接口,以及新配套法律法规带来的挑战;
3)开放数据集以及基准测试;
4)基于蜂窝无线网络的车联网(C-V2X)、移动边缘计算、智慧交通以及智慧基础设施研究;
5)基于新型硬件器件和架构(例如英特尔3D Xpoint)的先进算法研究。
分析来看,五大研究方向涵盖了自动驾驶汽车、车联网技术以及支撑自动驾驶的大规模智能基础设施。
在自动驾驶汽车层面,英特尔、Mobileye、德尔福、宝马已形成自动驾驶联盟,四家合作伙伴将更广泛地与汽车行业及其它潜在行业交付并拓展已开发的解决方案。
在车联网层面,英特尔与东软、哈曼、长安等多家企业达成合作,从打造下一代智能驾驶舱为切入点,在车联网、人工智能等领域进行探索,提升用户体验。
在智能基础设施层面,英特尔积极布局5G技术,联手中国移动、中国电信等通讯运营商开展5G试验,加速网络转型,联手华为、中兴、爱立信等通讯设备制造商,加速试验测试共同演示验证。
几乎没有企业做到布局如此完善。
英特尔公司高级副总裁、首席技术官兼英特尔研究院院长Michael Mayberry表示:“非常高兴与清华大学、中科院自动化研究所这样中国顶尖的大学、研究机构展开合作。基于三方对于前瞻性技术的研究与洞察,我们相信此次合作将为中国自动驾驶产业奠定强大的技术基石,作为英特尔的科技创新引擎,英特尔研究院致力于推动影响未来的前瞻性技术研发。从人工智能、自动驾驶、5G,到量子计算、神经拟态计算、概率计算等,我们始终位列全球技术发展的最前沿。未来,我们将继续引领并定义技术变革之路。”
英特尔无人驾驶解决方案资深首席工程师、首席系统架构师Jack Weast表示:“随着智能网联汽车将要以百万的量级在全世界的路面上部署的时候,安全的问题就变得越来越重要。但同时我们又发觉,目前汽车业界对这个问题验证的方法是不能从根本上解决这个问题的。”
不难看出这一系列布局背后,英特尔成立智能网联汽车大学合作研究中心后将会把自动驾驶安全研究放在第一位。
最近,Mobileye开发了一个名为RSS (Responsibility Sensitive Safety) 的责任敏感安全模型,以期通过数学的方式来界定“安全状态”。
其目标是通过一些数学公式从理论上来保证自动驾驶汽车的安全行驶,并通过形式化以下人类驾驶中比较具有主观性的几个常识确保自动驾驶汽车永远不会主动导致事故发生。
Jack Weast对《AutoR智驾》表示:“为什么我们今天会和中国这两家大学研究机构之间成立合作研究中心,也是因为我们觉得RSS确实需要完善,在加州做路测,其实路况还是要好得多,但是在中国这样一种更加高级复杂化的路况之下做路测,使得RSS的安全场景更全面,一般来说,我们必须达到自动驾驶的三级以上,三到四级,这个时间点是2020年左右,但从现在到2021年之间,RSS还需要做大量的路测。”
根据英特尔中国研究院介绍,RSS模型要达到的目标具有两重含义(以下内容来自英特尔中国研究院):
1)自动驾驶汽车本身不会导致事故(卷入事故和导致事故是完全不同的概念,如上文提到的例子,自动驾驶汽车可能卷入事故,但它不是事故的责任方)。2)自动驾驶汽车应该在其它车辆发生错误时做出正确反应。
也就是说RSS要做的就是在事故发生前设定游戏规则,主要用于自动驾驶系统中的决策部分,可以让其它OEM厂家将此模型直接放入他们的决策系统,从而促进行业标准,提高自动驾驶的整体安全。
4个“常识”判断责任方
对此,RSS通过形式化以下4个“常识”规则来确定“谁需要对事故负责”:
1)追尾不是前车的责任,后车必须保持足够的安全距离。
2)除非前车突然并线,红车突然插入黄车的车道导致追尾,责任在红车。3)不要刻板地使用“路权”(“right-of-way” is given not taken)。如果某辆汽车违反了交通规则进入自动驾驶汽车拥有路权的道路,但自动驾驶汽车有足够的时间刹车避免事故,则它必须刹车,而不能由于自己的路权高而向前冲,否则就要承担责任。4)小心被遮挡区域,小孩可能会被前车遮挡。
RSS是形式模型,需符合以下标准:
合理性:当RSS模型认为事故中自动驾驶汽车没有责任时,它必须符合人类判断的常识。
实用性:我们可以制定出一些不会导致事故的驾驶规则,即便事故发生,也可以明确不是自动驾驶车辆的责任。比较极端的做法是车辆一旦遇到意外情况就立刻停止,但是这种车是没用的,我们必须保证道路的通行能力。
什么是安全距离
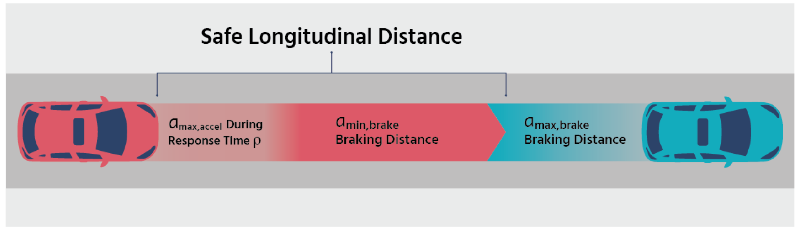
安全距离是指在最恶劣的情况下仍可以避免碰撞的距离。最恶劣的情况是指前车以最大刹车加速度开始刹车,后车发现后有一定的反应时间,并在反应时间内仍以最大加速度前进,然后改成以最小刹车加速度刹车,直到危险解除。因此,最小安全距离的计算公式如下:

参数:Vf前车速度,Vr后车速度,反应时间ρ、最小刹车加速度αmin,brake、最大刹车加速度αmax,brake以及最大加速度αmax,accel。
说明:
*上述公式中的参数应该是法规制定的合理值
1)人类驾驶汽车和自动驾驶汽车的参数可以不同。比如自动驾驶汽车的反应时间一般会比人类短,而且自动驾驶汽车可以比人类驾车的刹车更有效。因此,自动驾驶汽车的αmin、brake可以设置得更大些。
2)不同路况下可以设置不同的参数(湿滑路面、冰、雪等)。
相对行驶、横向移动等情况都会涉及不同的安全距离的计算方式,这里不再赘述。
路权
多条道路交叉或汇合时就会涉及到路权。
有些道路的优先级高于其他道路,在这些道路上行驶的汽车就拥有路权。RSS模型涉及到部分场景的解决方法,后期仍然需要扩展模型,并对安全距离的计算进行必要调整。
为了更好地理解路权,我们需要先定义一个名词:纵向顺序(Longitudinal Ordering),用来代表距离交叉点的直线距离。如下图所示,左图中,在纵向顺序上红车在蓝车前面,因为Dred < Dblue;右图反之。
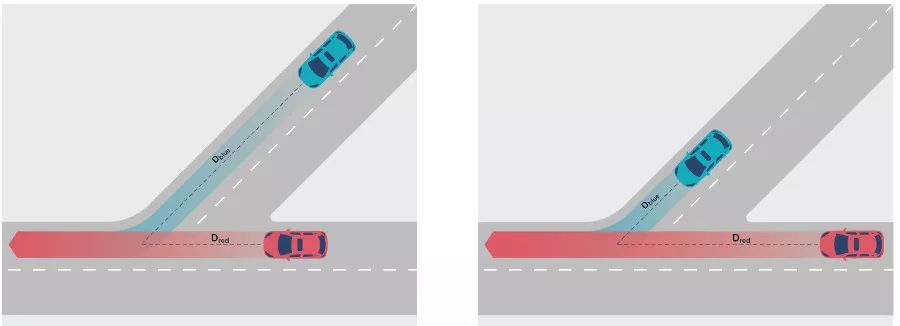
和上文提到的公式化安全距离一样,我们同样可以定义多道路交叉时的纵向安全距离。如下图所示,红车拥有路权,优先级高,那么蓝车必须在进入路口前的安全距离内进行刹车,从而保证红车正常行驶。
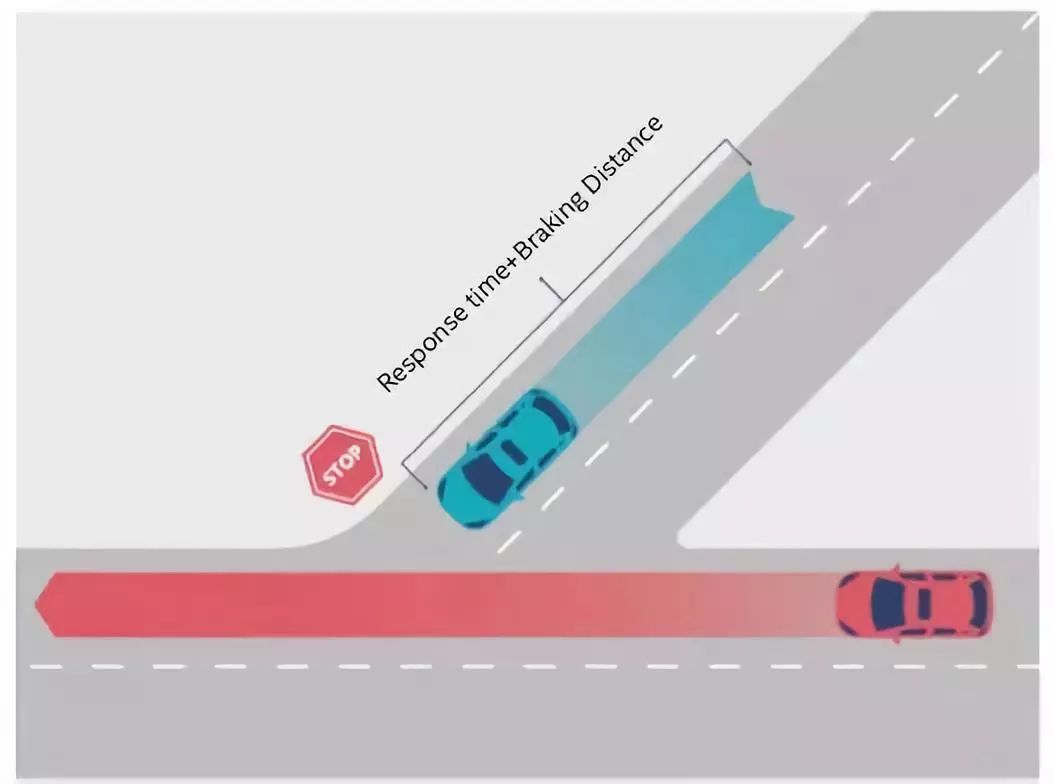
如前文所述,RSS并不是刻板地以路权做为唯一判断,比如在下图中,蓝车来不及刹车闯入了红车的车道,红车也要采取刹车以避免碰撞。
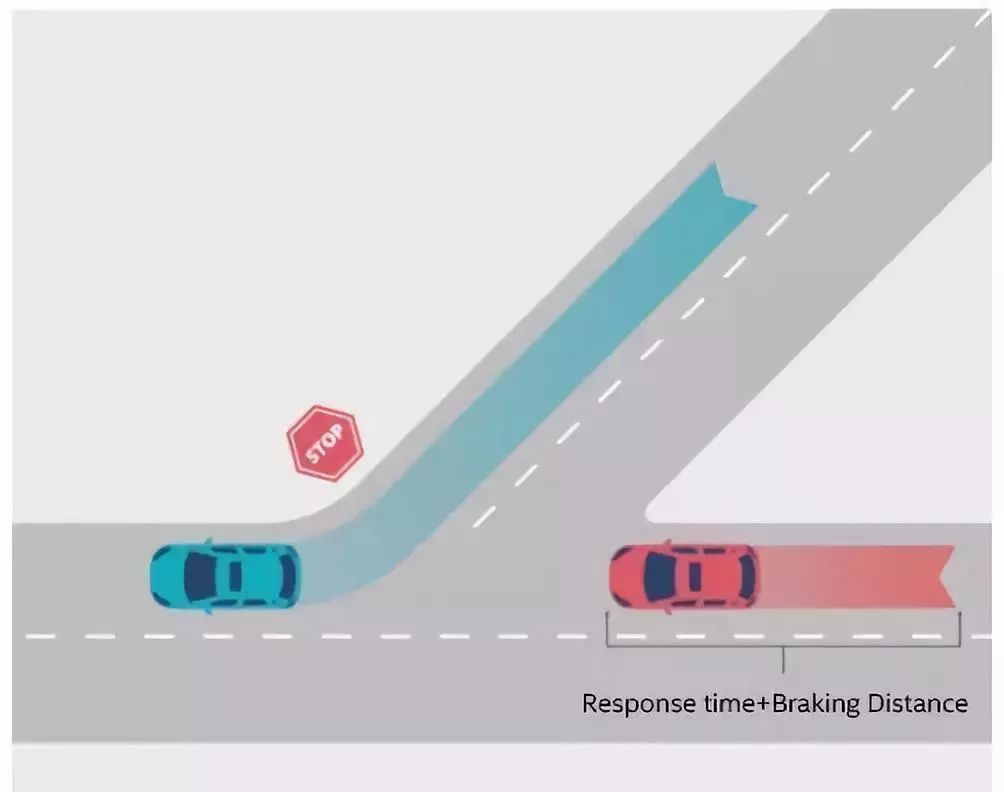
甚至,RSS模型还可以支持轻微横向位移来避免撞击,如下图所示:
行人和遮挡
对于行人,首先需要明确行人的路线和优先级。某些地方行人的路线很明确,如人行道或者交叉路口的斑马线。这些地方自动驾驶汽车在自己车道上行驶时,一般无需担心行人会突然闯进来,车有优先权,但是也必须遵循灵活运用路权的原则。
但在有些地方,如居民区内,行人路线不明确,这时必须谨慎驾驶,给行人更高的优先权。考虑到人类的反应时间大概是500ms,最大加速度是2m/s²(博尔特的加速度是3.09m/s²)。那么,根据之前的公式,车辆与行人之间的安全距离是50cm,行驶时必须保证处于这个安全距离之外。
另外,需要格外注意有遮挡的环境。下图中的车辆正在通过一排停车位,一名儿童突然以速度10km/h的速度跑过来(比如在追球)。根据计算,10km/h的速度必须要保持15m的安全距离才可能避免碰撞发生。但此时汽车侧方的视野只有0.3m,显然无法满足安全要求。在这种情况下,RSS模型做了如下定义:
在车辆可以发现目标的第一时间(Te)到反应时间结束时(Te + ρ),车辆没有加速,且到发生撞击或者完全停下来的时刻(Ts),车辆一直以不低于αmin,brake的加速度在刹车
从Te到Ts这段时间内,车辆的平均速度低于行人的平均速度
这种情况下车辆是没有责任的。这个定义隐含的论点是:在发生撞击的时刻,车辆的速度比行人的速度低,或者两者都移动得很慢,从而使撞击的伤害降到最低。
RSS模型通过语义方式来描述测量结果、操作空间等,来指导无人驾驶汽车的规划、感知和动作。
这种语义可以理解为我们学交规时的驾驶规范。
例如,它不会做出这种描述:以当前速度开13.7米,然后以0.8m/s²的加速度加速前进,而是会发出语义指令,如“跟随前车”或者“从左侧超车”。
与人类驾驶类似,RSS提供的这个语义模型,并不是加速度矢量的几何运算,而是关于纵向或者横向目标的描述。
这对降低规划的运算复杂度(不会随着时间或邻车数量的增加而呈指数上升)、提升安全性和舒适性交互、以及传感器融合方面都至关重要。由于采用了语义模型,离线验证数据库只需要10^5量级的驾驶数据,就可以保证RSS模型达到死亡率10^-9次/小时的安全要求。
RSS模型的开发者,Amnon Shashua教授(英特尔子公司Moblieye公司首席执行官兼首席技术官)曾说: “世界上最优秀的人类也无法避免超出他们控制能力的事故,自动驾驶汽车亦然。但是最负责、最老练、最谨慎的司机,不太可能由于自己的过失导致事故,特别是像自动驾驶汽车拥有360度视力和闪电般反应速度的话。”
英特尔无人驾驶解决方案资深首席工程师、首席系统架构师,Jack Weast解答RSS。
Q:RSS通过数学公式来定义安全状态,会不会出现比较刻板的现象?是否可以理解为RSS完全是通过传统的机器学习的算法来实现自动驾驶的规划和决策,它不考虑深度学习、人工智能对优化决策的影响?如何保证RSS所有场景覆盖的全面性,以及目前英特尔和Mobileye在对RSS模型测试中,是否有值得借鉴的成果?
Jack Weast:在整个RSS中用了各种各样的人工智能的方法,具体在驾驶策略方面,我们用的是叫增强学习。
增强学习的好处是什么?
它可以定制驾驶的方式,因为增强学习是,如果你做了这一个判断,它是有一个奖励机制在里面的,所以对于汽车自己的驾驶来说,它可以做定制化。但谈到整体的人工智能技术,我们有深度学习,尤其是在自动驾驶车的认知、计算机视觉方面用的是深度学习。机器学习我们也有用到。
有关第一个数学公式的问题。在我们的数学公式中有一些是常数,是不变的,有一些是变量,这个变量可能更会因地制宜一些。
比如在中国,我们在设置汽车变道的距离方面就是一个变量,因为在中国可能汽车变道留的距离更短一些。这也是为什么我们和清华大学等中国的高校和中国的政府机构合作。比如政府从道路监管方面可以接受的风险,比如在住宅小区里限速很低,在高速公路限速高得多。所以我们会通过变量的设置来去调整。
为什么我们把RSS拿出来和业界进行共享的原因。美国政府曾经就所有撞车的事故发布过一篇研究报告,其中总结了37个撞车前的场景。
这种归类是基于美国政府相关机构收集的多年的在美国发生的交通事故所做出来的,基本上可以覆盖99.4%的撞车类型的交通事故的情况。我们也用RSS和美国政府的研究报告的结果做了一个比对,发觉RSS完全覆盖了这37种类型的撞车前的场景。但我要强调的是,这是在美国的情况,而且不是百分之百,因为只覆盖了99.4%的汽车事故,这也是为什么我们要和中国的高校合作建立这样的一个研究中心。
我们希望能够有更多中国的交通数据。目前,我们RSS已经在以色列进行车辆的路测,很快在美国也会做相应的路测,我们希望通过和中国的合作能把RSS拿到中国来。
Q:如果在道路上跑的车辆都是自动驾驶的车,因为自动驾驶会非常守规矩,整个交通的安全状况就非常好判断,安全系数比较高。但实际情况来看,未来很长一段时间内是自动驾驶和传统驾驶的车辆混合的交通方式。从技术上如何建立更加平衡的交通体系来保证安全?
Jack Weast:其实这正是RSS诞生的初衷。
因为在RSS的模拟测试中,自动驾驶的数据公式完全是根据人类驾驶的方式和习惯来设定的。所以模拟测试也展现出来,其实基于RSS的自动驾驶车辆的驾驶反映操作是拟人的,基本上和人类驾驶员是一样的。
举个例子,如果是自动驾驶车,它被其他人类驾驶的汽车从侧方别住了,如果是人类驾驶车肯定会减速甚至停下来,如果是基于RSS的会有同样的处理。
其实还有一部分的内容我可能没有讲,也就是说在RSS中会有这样的一个场景,就万一发生了交通事故,警察来现场进行处理,我们要勘察交通事故的现场,并且进行责任的认定。
基于RSS的自动驾驶车辆对于安全设定的原则叫适当的反映,来保障安全。也就是说它和人类的安全理念是同样的,因此在责任鉴定上到底是人驾驶车的责任,还是自动驾驶车的责任,因为基于的理念是一样,所以更容易判断。
Q:首先RSS模型最后呈现的产品形态是什么样的?因为现在知道它是一个模型,是软件的东西、算法的东西,最后呈现在车上的状态是什么样的?现在跟大学和科研院所合作,包括你们在以色列那边做测试,做测试的时候和做合作的时候到底在合作什么内容?
Jack Weast:首先,RSS虽然是英特尔公司的,但我们希望把它作为一种资源贡献给业界使用。
它其实就是代码,这个代码可以被别人的产品用,当然“别人的产品”我指的是自动驾驶车的基于AI的软件。它会和所有的不同自动驾驶车软件兼容,都是可互操作的,可以有不同的实施方式,可以在CPU上或者是FPGA上。
至于其他的厂家怎么用,他们可以完全用自己的创新去做。而我们的RSS更多的是一套技术规范,或者是行业的标准。我们其实非常希望在中国可以做很多的事情,因为中国在这方面肯定会有自己本土化等各方面的创新。
在以色列RSS的路测是在耶路撒冷的实际道路上。你也知道耶路撒冷的路况非常复杂和混乱。我们在网上有一些视频,就是带着RSS的自动驾驶车辆在实际道路上做变道的驾驶实际情况。我们也非常希望在中国做RSS的实际路测。
Q:之前有很多新闻报道英特尔和Mobileye的车在以色列做路测的时候,有闯红灯的情况,这种情况下是否有你们RSS的模型?
Jack Weast:闯红灯的路测车里有没有使用RSS模型,这个我现在不是很清楚,需要再去确认一下。
但无人驾驶车闯红灯是一个很好的例子。因为那个路口有交通监控的摄像头,那个摄像头是无线的摄像头,它发出了信号干扰到了无人驾驶车本身的传感器,它要感知那个红灯,被摄像头一干扰就感知不到红灯了。
我们觉得这是一个非常好的例子,就是不能依赖于外界的能力,车本身必须要有非常强的能力来做这样的自动驾驶,否则的话外界的一个因素可能就影响到它了。
因为如果是纯人工智能来做驾驶决定的车,在实际非常复杂的路面状态下,它连路都上不了,它要从匝道上到主道上根本上不去。但有RSS的车辆就不一样了,我们有一个专门的视频,在非常复杂、混乱状况的交通路面上,RSS无人驾驶车成功上路,变道成功。
事实上我刚才谈到了对于自动驾驶车辆而言有三个层面:感知、规划、行动。而我们的RSS其实就是围绕第二个规划的层面,我们包裹了一层安全的防护。
但是我们谈到RSS的安全一定要基于第一个层面,就是感知,你的感知必须是准确的,要获得准确的感知,我们觉得不能只依赖于一套感应的系统。所以在RSS的自动驾驶车辆上有两套独立的感知系统,一套是自动驾驶,比如地图以及自己的摄像头,这是一套感知的系统。另外一套独立的感知系统就是我们谈到的无线电雷达和激光雷达。通过并行的感知系统,可以把感知的错误率降到最低。
Q:这个模型加进去以后对整个车的系统有什么影响?
Jack Weast:关键是看你如何实施了。
其实从英特尔Mobileye的解决方案可以看到,我们这个产品是软件一体的、低功耗、低成本的计算设施。
首先,它的硬件是专门用途的,针对自动驾驶的软件做了定制化优化,所以它的能耗比较低。同时,我们知道在业界有很多其他厂商的做法是使用通用计算的平台,但通用计算的平台毫无疑问必须在计算资源方面做到融合设计来支持一些你并不一定要用到的软件功能,但我们无需这样做,比如Mobileye EyeQ的产品线,本来它用于通用计算的部分特别少,绝大部分都是做定制化,对上层的软件算法加速的。
所以我们的产品能够真正实现,我们非常有信心能提供低成本、低功耗的自动化驾驶的解决方案。其实最关键的一点是我们软硬配套的定制化设计。
Q:除了RSS以外,世界上还有哪些主流的自动驾驶模型?这些模型彼此之间的区别和分歧在哪里,英特尔刚才说的是标准,英特尔打算如何让自己的模型成为行业标准。这个模型对自动驾驶的开发会起到什么作用,能举几个具体的例子吗?
Jack Weast:我先回答第三个问题。这种责任模型是非常重要的,为什么?
因为自动驾驶车的安全验证,让人们如何信任它的安全,这种方法必须是开放和透明的方法。
也就是说我们不可能去信任一个封闭的专有的系统,说它是安全的。我们通过RSS能够做到这三点,也就是开放、透明和可验证,能够让每一个参与的人都去信任自动驾驶车。
确实,在业界有很多类似于RSS的模型存在,这也是为什么把RSS拿出来和业界共享的原因,因为我们觉得存在类似的模型是一件好的事情,我们可以互通有无,最后共同做出一个大家都遵守的、政府也支持的责任模型。
我们谈到这种责任模型并不是一个新的概念,其实在工业系统、自动化系统,在航空领域早就存在了。比如在航空领域有飞行控制系统,如果它感知到飞行员会做任何导致飞机比如坠机的操作,它就会立刻从机器控制方面阻止飞行员做任何类似的操作。还有在工业界,我们知道有机械手臂,机械手臂本身也是适用于“安全信封”的系统。我们现在尝试的是把工业自动化系统的概念应用到自动驾驶车这个领域。
Q:总的感觉RSS这个模型现在的技术还是不够完善,还在各种测试,这个技术在未来几年会不会相对成熟一些?
Jack Weast:为什么我们今天会和中国这两家大学研究机构之间的成立合作研究中心,也是因为我们觉得RSS确实需要完善。在加州做路测,其实路况还是要好得多,但是在中国这样一种更加高级复杂化的路况之下做路测,对使得RSS的安全场景更全面。一般来说,我们必须达到自动驾驶的三级以上,三到四级。而且目前主流的厂商都在说达到三级、三级以上的自动驾驶时间点应该是在2020-2021年。所以这也是我们RSS同样的时间点。我们目前的想法,RSS的第一次部署应该是在2021年左右,可能会早一年,也可能会晚一年,具体是看实际整车厂商,我们客户的具体时间点。但从现在到2021年之间,RSS还需要做大量的路测。
Q:能够把RSS定义为自动驾驶的,好比是阿西莫夫三定律之于机器人的道理?
Jack Weast:对,可以这么理解。就像机器人规定不能伤害人类一样。其实RSS是我们对自动驾驶车打的一圈保险封条。因为我们知道人工智能系统不会是完整的,RSS的目的是保证自动驾驶车不会对人类或者是对其他的包括车载内的物体造成伤害。
因此,RSS其实是为自动驾驶车规定了基本原则。
-
【话题】特斯拉首起自动驾驶致命车祸,自动驾驶的冬天来了?2016-07-05 0
-
自动驾驶真的会来吗?2016-07-21 0
-
细说关于自动驾驶那些事儿2017-05-15 0
-
自动驾驶的到来2017-06-08 0
-
AI/自动驾驶领域的巅峰会议—国际AI自动驾驶高峰论坛2017-09-13 0
-
即插即用的自动驾驶LiDAR感知算法盒子 RS-Box2017-12-15 0
-
中国自动驾驶行业前景看好,国产技术迅速发展2019-04-03 0
-
如何让自动驾驶更加安全?2019-05-13 0
-
自动驾驶汽车的处理能力怎么样?2019-08-07 0
-
自动驾驶系列报告大放送了涉及传感器,芯片,执行控制等2019-08-09 0
-
联网安全接受度成自动驾驶的关键2020-08-26 0
-
如何保证自动驾驶的安全?2020-10-22 0
-
2020年自动驾驶汽车成熟度指数分析2021-01-22 0
-
自动驾驶系统设计及应用的相关资料分享2021-08-30 0
-
自动驾驶技术的实现2021-09-03 0
全部0条评论

快来发表一下你的评论吧 !
