

高速计数的几个问题及一些见解
电子说
描述
最近课程进度正好讲到高速计数,有些学员反馈说高速计数很难,没有讲之前很多地方看不懂,我分析了每期学员的学习情况总结了几个问题及一些见解,希望对大家学习有所帮助:
一、 不知到什么场合需要用到高速计数。
高速计数与普通计数器最大的区别在于计数频率高,根本原因是因为其原理有着本质上的区别。普通计数器是通过扫描计数输入条件是否发生变化来进行计数,其计数频率受扫描周期的影响,所以频率不会太高。而高速计数器则是通过外部高速输入I点直接采集外部高速事件到CPU中来实现计数,其计数频率不再受扫描周期限制,所以计数频率可以高达200KHZ。由此可知,高速计数主要是应用于计数频率较高的场合,应用时常与编码器配合使用,典型的应用有两个:
1) 用于速度检测。
2) 用于位置检测。
二、 不知道高速计数程序该从何写起。
高速计数程序虽然步骤较多,但是还是有迹可循,编程步骤较为固定,总结了一下编程步骤不外乎一下几步:
1) 选择合适的高速计数器以及定义符合要求的工作模式,该步采用HDEF指令
如图1-1所示。HSC为高速计数编号1-5,MODE为工作模式可选0、1、3、4、6、7、9、10。该指令定义了计数输入,方向及复位输入端子,如图1-2所示。
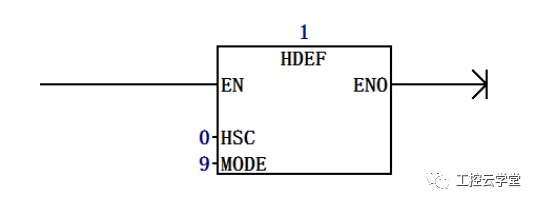
图1-1

图1-2
2) 写高速计数器的控制字节。该步应用MOV_B将控制字节写入对于地址中,如图1-3所示,控制字节表如图1-4所示。
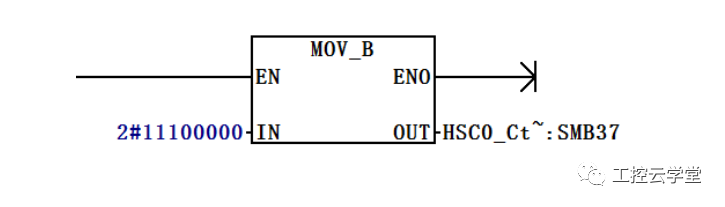
图1-3
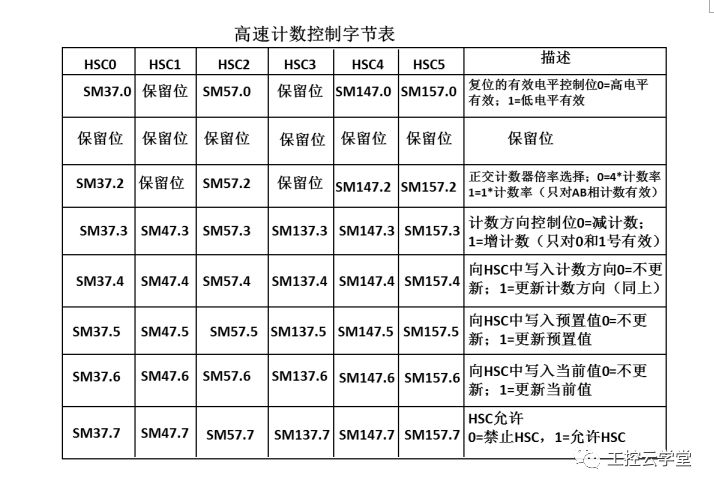
图1-4
3)设定新的预设值MOV_DW(可选)
当需要达到某个计数值时触发动作,则需要提前设置一个预设值,高速计数预设值为一个32位双整数,所以用MOV_DW指令,如图1-5所示。
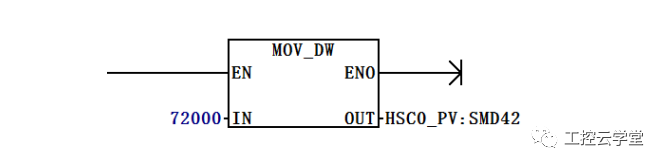
图1-5
4)设定高速计数器的当前值MOV_DW(可选)
需要计数从一个特定的值开始,如从0开始,则需要将当前值更新成0,当前值也是一个双整数,所以用MOV_DW操作,如图1-6所示。
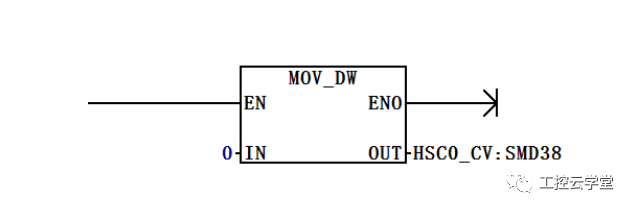
图1-6
高速计数常需要中断配合使用,需编写中断程序。高速计数器当前值等于预设值(CV=PV)时会产生中断;除0,1号模式外其他模式方向改变也会产生中断;有外部复位输入的模式下,当外部复位输入时也会产生中断。中断事件号如表1-7所示。
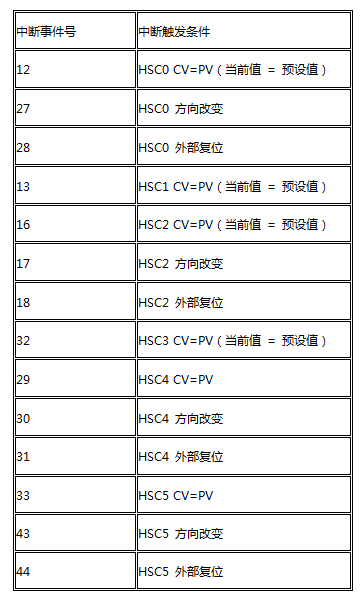
表1-7
注意:高速计数触发动作一定要CV=PV中断来触发,不能用比较指令。
5)允许中断ENI。
6)连接中断程序和事件号ATCH,如图1-8所示。
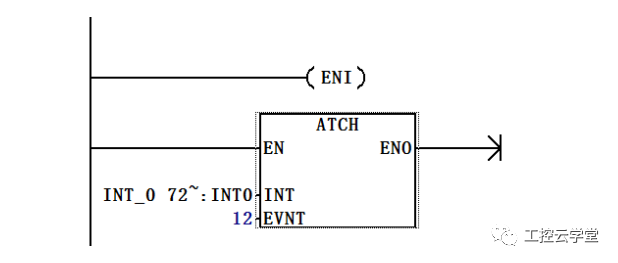
图1-8
7)编写中断程序。
8)执行高速计数器HSC,如图1-9所示。
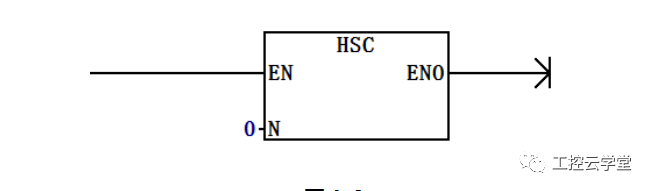
图1-9
不同的高速计数器,程序编写方法类似,只是控制字节及预设值地址等不相同,如表1-10所示。
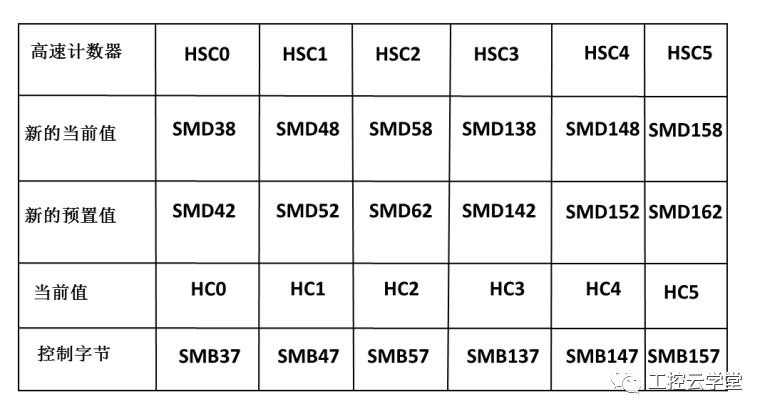
表1-10
以上就是编写高速计数程序的基本步骤,只要理解了以上八步,高速计数程序再也难不倒你们了。
附上一个小案例供大家学习:利用高速计数器HSC0计旋转编码器的数值,当计到1000个数点亮Q0.0,当计到2000时熄灭并清零当前值,如此循环不断,程序如图1-11至1-13所示。
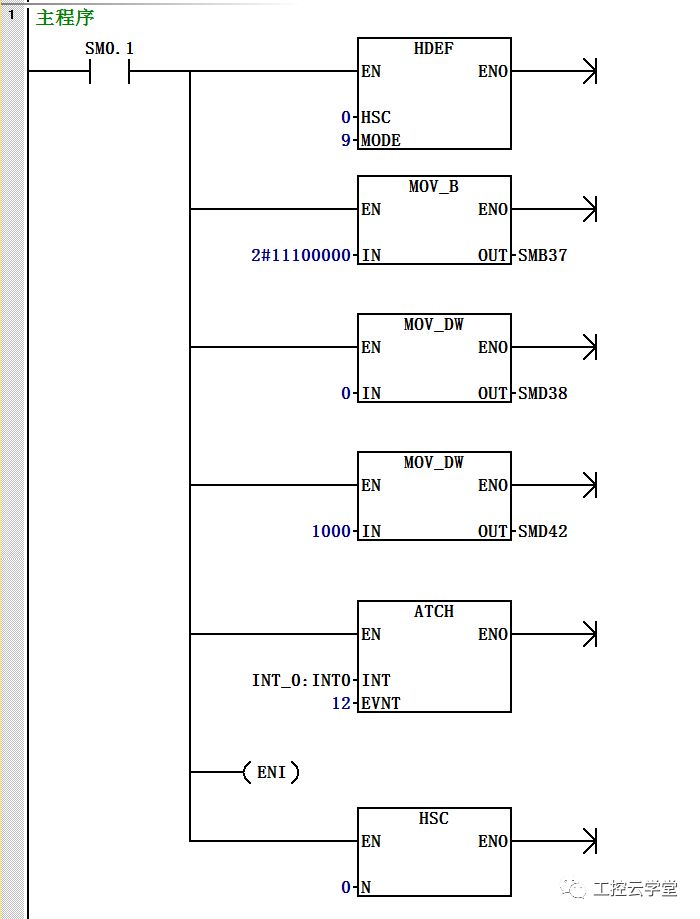
图1-11
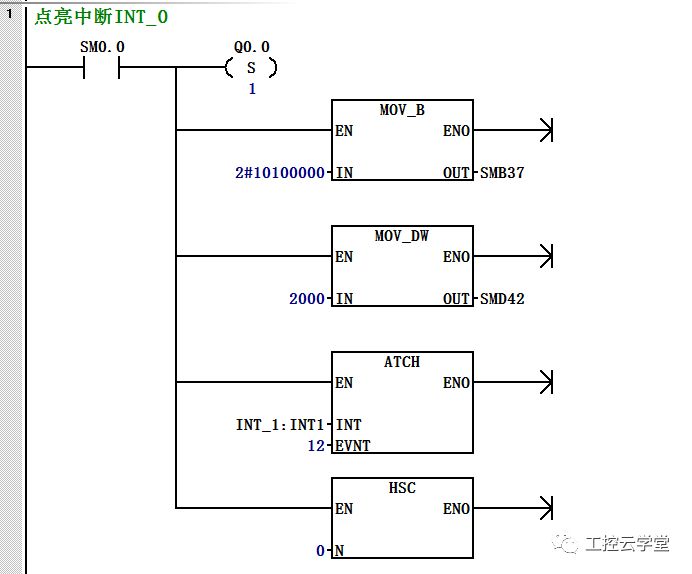
图1-12
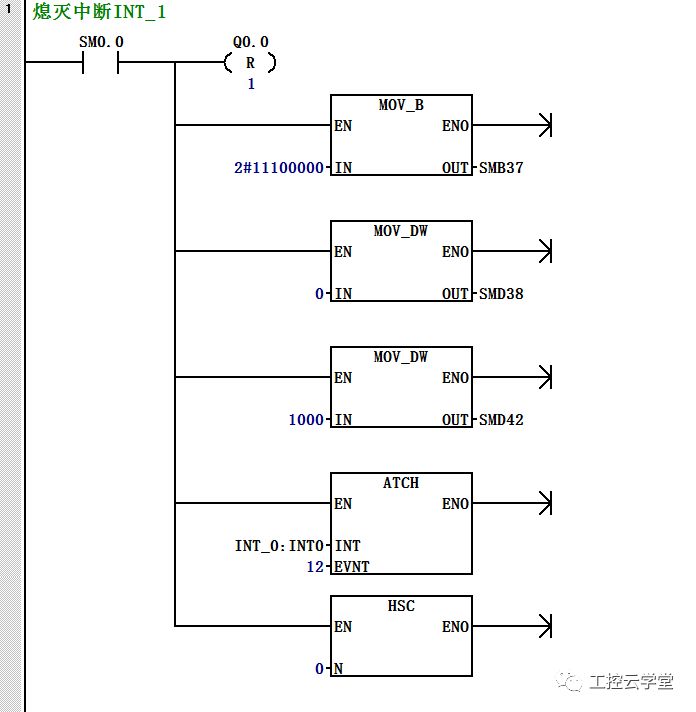
图1-13
-
pH电极使用中应注意的几个问题2009-04-10 642
-
I2C总线应用中的几个问题2009-09-13 496
-
系统时域分析法中几个问题探讨2009-10-25 519
-
应用傅氏算法的几个问题讨论2009-07-20 1829
-
探讨I2C总线应用中的几个问题2016-02-25 581
-
微电子概念的几个问题2016-08-08 706
-
电路设计中应该注意的几个问题2016-10-10 479
-
巧用编程解决WINCC的几个问题2017-02-07 736
-
经验:蓝牙Beacon应用于室内定位的几个问题总结2017-09-19 1285
-
关于线电压和相电压的几个问题2020-06-18 8460
-
关于差动放大电路实验的几个问题2021-04-09 576
-
电路在线维修测试中的几个问题2021-09-24 399
-
AUTOSAR通信协议栈的几个问题(一)2023-01-31 1228
-
恒温恒湿试验箱使用容易疏忽的几个问题2023-09-02 296
-
学习处理电源emi的几个问题2023-11-20 79
全部0条评论

快来发表一下你的评论吧 !
