

ABB工业机器人中不使人注意的5大实用技巧详细概述
电子说
描述
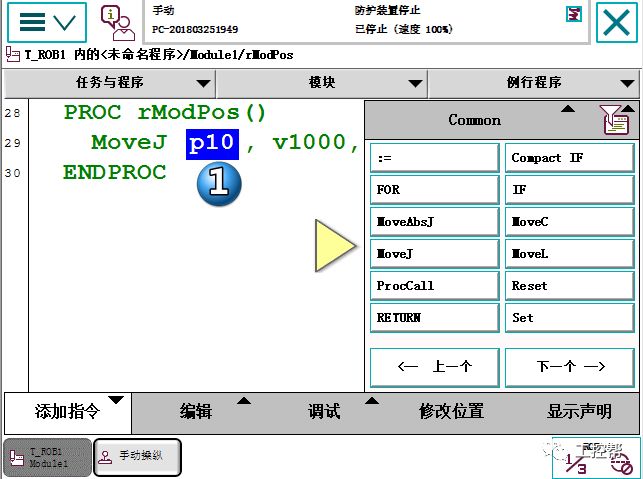
1.复制粘贴参数加快编程时间
有的时候我们需要快速大量的更改指令语句里的参数,很浪费时间,实际上参数是可以复制的,步骤如下。

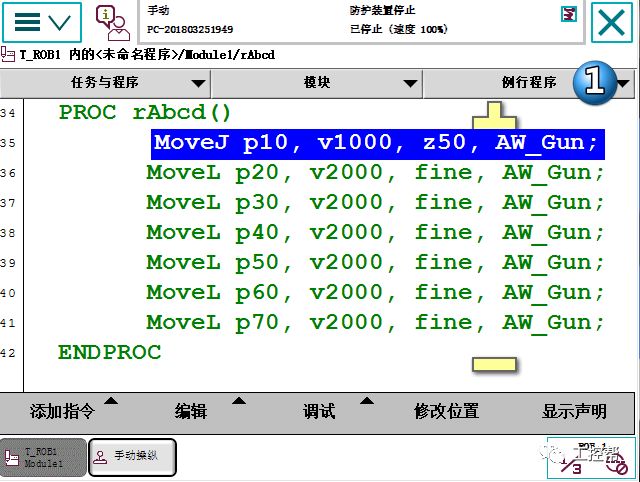
比如我们有个这样的需求,就是将上面的V1000更改为V2000。
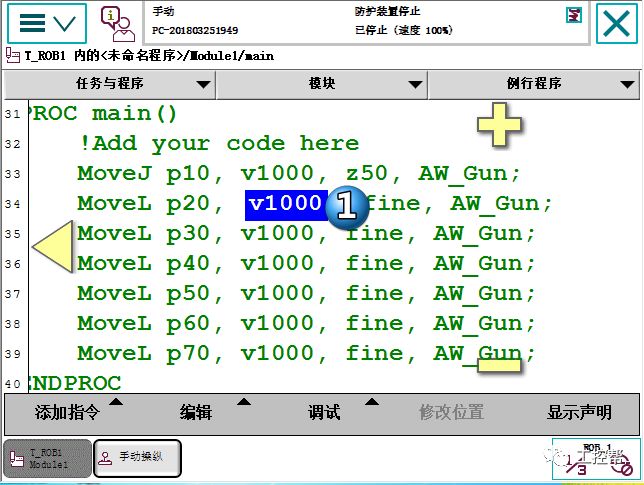

鼠标左键双击“V1000”进入选择“V2000”速度数据,单击确定。
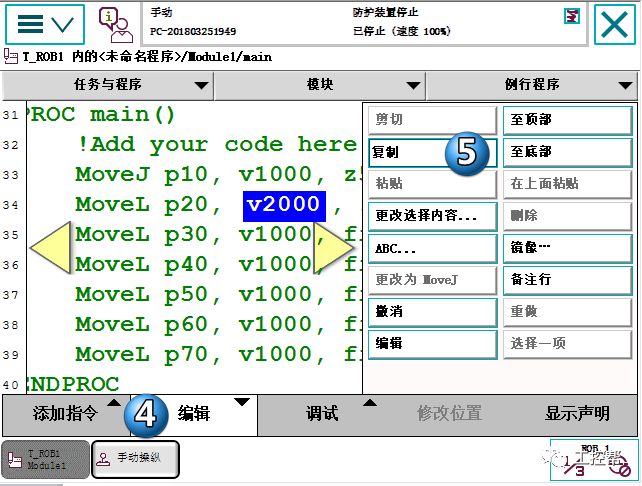
然后选择“编辑”在下拉菜单中选择“复制”对其单项速度参数进行复制。
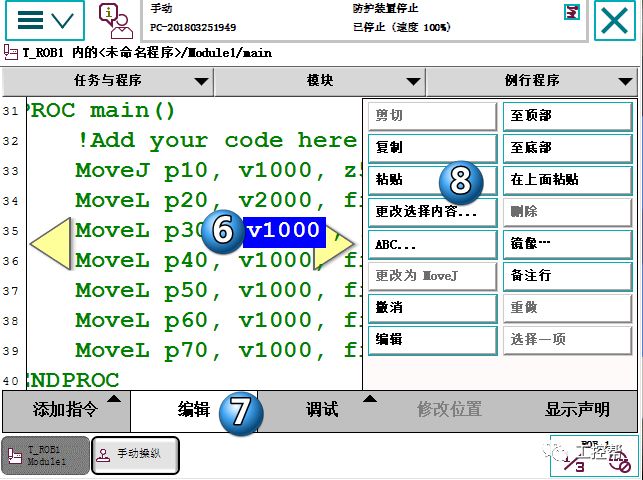
选择下一条的“速度”参数,然后选择“编辑”,在下拉菜单中单击“粘贴”选项。

这样速度数据就已经复制粘贴了一条,下面的速度数据也可以一直粘贴下去如下图。
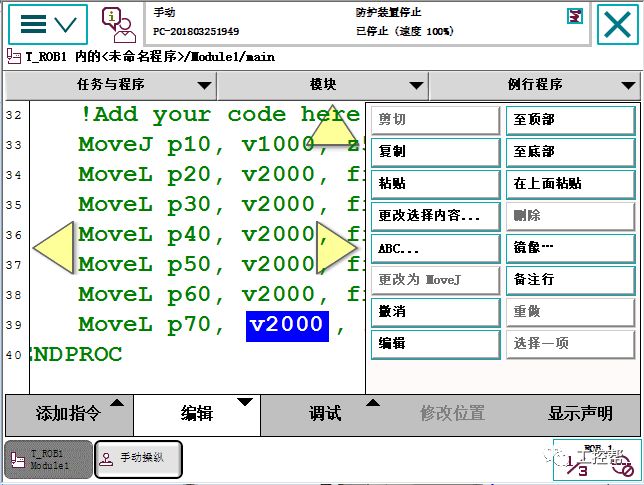
他的参数一样可以复制粘贴,快动手试试吧!
二、如何复制例行程序

首先要新建一个例行程序,比如这里新建立了一个rAbcd例行程序。
选择“例行程序”

选择“文件”菜单中的“复制例行程序”

确认名称(不要与其他例行程序重名),确认复制到哪个任务里(默认就一个任务),确认复制到的模块然后点击确定。


复制完成
首先需要在需要对其的工作台上建立一个工件坐标系,这里工件坐标系建立在矩形体表面上。
然后选择对准。
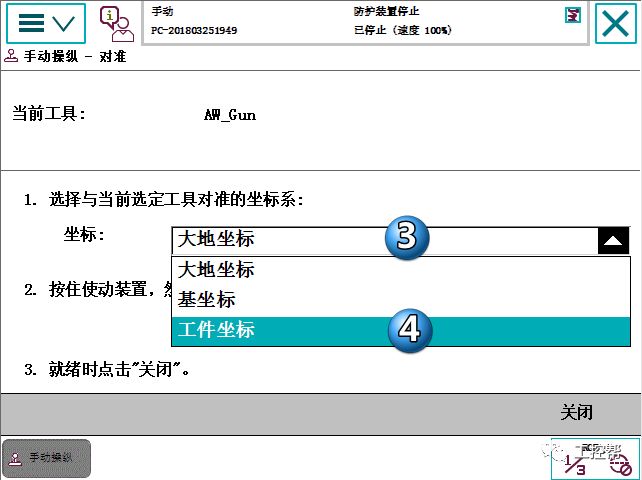
将坐标系选择为工件坐标。
按下使能按钮,点住开始对准,对准之后工具末端z轴就会垂直于工作台表面了。
3.对齐坐标系
有时候需要调整工具末端垂直于工作台表面,如果工作台表面有工件坐标系这一切就简单多了,我们有快速对正工件坐标系的方法,下面来一起学习一下。
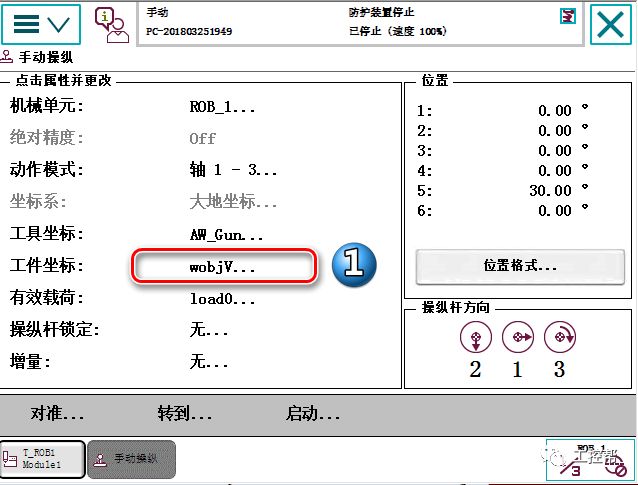
首先需要在需要对其的工作台上建立一个工件坐标系,这里工件坐标系建立在矩形体表面上。
然后选择对准。

将坐标系选择为工件坐标。
按下使能按钮,点住开始对准,对准之后工具末端就会垂直于工作台表面了。
4. 如何快速查找指令
ABB工业机器人指令很多,有的时候需要切菜单进行查找,很繁琐,这时候我们可以使用添加指令里面的过滤功能,达到快速查找指令的目的,以添加一条TPWrite指令为例,步骤如下。
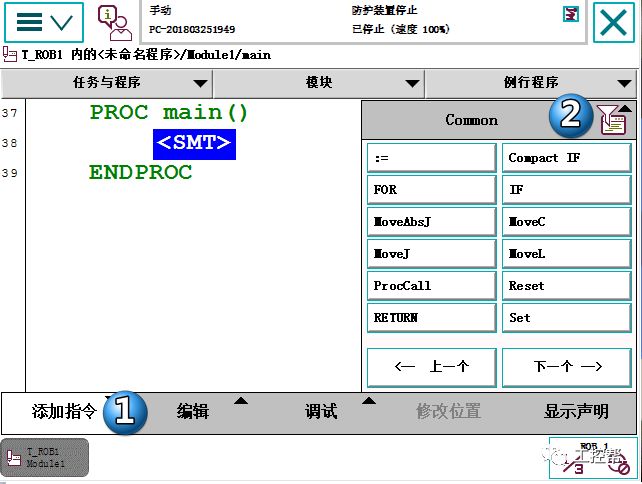
点击添加指令,选择指令菜单右上角的漏斗标识(有些旧版本没有,如果没有漏斗标识只能通过切换指令菜单来寻找指令)。

在活动过滤器输入框里面输入“TPWRITE”,鼠标左键单击“过滤器”。

这时候就能看见TPWrite指令了,点击即可添加。
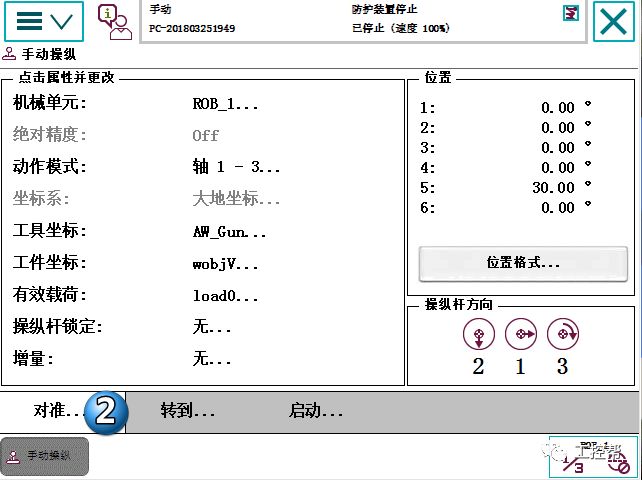
5.如何快速转到位置
在现场编程中我们有时候需要确认已经示教过点的位置,下面来学习一下转到位置的操作步骤。
首先要有目标点
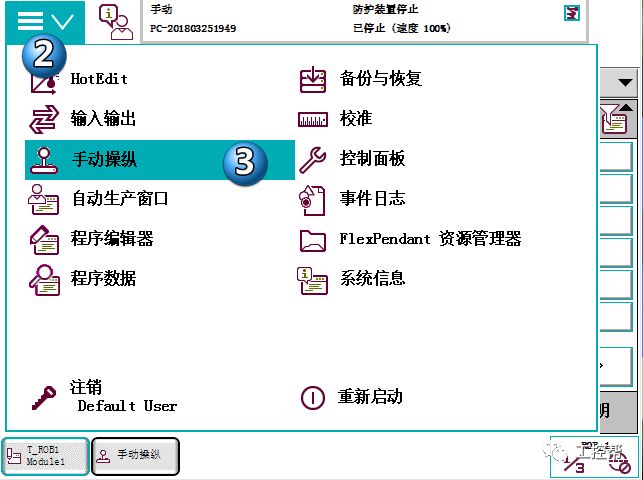
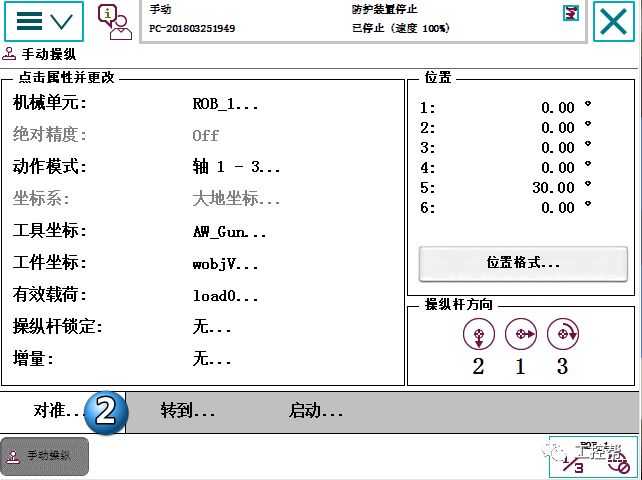
然后进入菜单点击手动操纵。
确认机械单元活动工具活动工件等信息之后打开使能,选中P10目标点点击转到。
-
ABB IRB5400-喷涂工业机器人2015-01-14 0
-
什么是工业机器人2015-01-19 0
-
工业机器人应用广泛2017-09-07 0
-
ABB焊接机器人问题2017-10-16 0
-
零基础玩转工业机器人2018-10-29 0
-
青岛ABB工业机器人无法正常进入系统故障维修2020-07-16 0
-
ABB机器人维修保养指南2020-08-19 0
-
工业机器人中面对的控制问题是什么2021-06-28 0
-
工业机器人应用编程考核设备分享2021-07-01 0
-
ABB机器人实训平台实验2021-07-01 0
-
SCARA工业机器人相关资料推荐2021-07-01 0
-
ZNH-IR04工业机器人综合应用实训平台实验2021-07-01 0
-
工业机器人仿真与编程2021-09-07 0
-
工业机器人中有哪些控制问题2021-10-11 0
-
PDF——工业机器人技术及应用2022-10-16 0
全部0条评论

快来发表一下你的评论吧 !
