

PID控制器比例、积分、微分有什么控制规律?及应该在哪些场合使用
电子说
描述
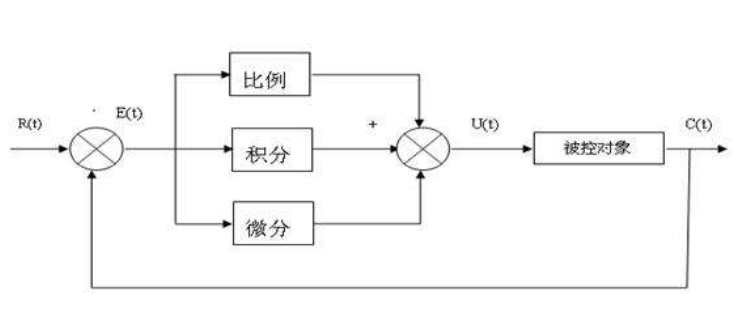
PID控制器综合了比例、积分和微分控制规律,本文总结了各种控制规律的特点及使用场合,供大家比较使用。
PID控制规律比例控制的输出信号与输入偏差成比例关系。偏差一旦产生,控制器立即产生控制作用以减小偏差,是最基本的控制规律。当仅有比例控制时系统输出存在稳态误差。
PID控制规律对于一个自动控制系统,如果在进入稳态后存在稳态误差,则称这个系统是有差系统。为了消除稳态误差,必须引入积分控制规律。积分作用是对偏差进行积分,随着时间的增加,积分输出会增大,使稳态误差进一步减小,直到偏差为零,才不再继续增加。因此,采用积分控制规律的主要目的就是使系统无稳态误差,提高系统的准确度。积分作用的强弱取决于积分时间常数TI,TI越大,积分作用越弱,反之则越强。由于积分引入了相位滞后,使系统稳定性变差。因此,积分控制一般不单独使用,通常结合比例控制构成比例积分(PI)控制器。
PID控制规律在微分控制中,控制器的输出与输入偏差信号的微分(即偏差的变化率)成正比关系。可减小超调量,并能在偏差信号的值变得太大之前,在系统中引入一个有效的早期修正信号,从而加快系统的动作速度,减少调节时间。微分控制反映偏差的变化率,只有当偏差随时间变化时,微分控制才会对系统起作用,而对无变化或缓慢变化的对象不起作用。因此微分控制在任何情况下不能单独与被控制对象串联使用。 需要说明的是,对于一台实际的PID控制器,如果把微分时间TD调到零,就成为一台比例积分控制器;如果报积分时间TI放大到最大,就成了一台比例微分控制器;如果把微分时间调到零,同时把积分时间放到最大,就成了一台纯比例控制器。由于PID控制规律综合了比例、积分、微分三种控制规律的优点,具有较好的控制性能,因而应用范围更广。
PID控制器可以调整的参数是KP、TI、TD。适当选取这三个参数的数值,可以获得较好的控制质量,实际应用过程中很多工程技术人员对PID参数整定不是很数量,这是应选择自整定功能强和控制算法先进的人工智能调节器,方便获得最佳的PID参数。在选择PID控制规律时,应根据被控对象的动态、静态特性以及实际控制要求和控制品质来选择。
-
PID控制算法【精】2015-12-28 0
-
浅析PID控制的P、I、D项选择2016-01-15 0
-
干货分享!PID控制算法精华总结!2016-01-26 0
-
学习算法有捷径,牢记这几点PID控制算法精华总结和参数整定三大招2019-05-30 0
-
最简单也最经典:学习一下PID 控制算法2019-09-22 0
-
最简单却又最经典的PID控制算法2019-10-14 0
-
轻松解读PID控制算法的三种参数的自整定方法2020-02-23 0
-
PID Controller比例积分微分控制器2021-09-03 0
-
PID控制器的控制规律2021-09-07 0
-
PID控制器简介2021-09-07 0
-
pid算法_pid控制原理2012-09-09 194585
-
过程控制中的PID控制技术2018-12-22 7814
-
PID控制器之比例加积分加微分控制规律2020-06-19 4072
-
PID控制规律及特点2023-03-09 4721
-
详解PID回路控制方案2023-12-31 513
全部0条评论

快来发表一下你的评论吧 !
